Российский Университет Дружбы Народов
Инженерная академия
Кафедра кибернетики и мехатроники
Курс «Введение в наноинженерию»

"Микро – и нанороботы"
Студент ИИб-201 (2 курс): Сметанин Е. А.
Преподаватель: доцент Лапшинский В. А.
Москва 2016 г.
Аннотация
В этой работе рассмотрены микро – и нанороботы, имеющие непосредственное отношение к наноинженерии, медицине и т.д. Рассмотрены их свойства и применение. Освещены основные понятия о робототехнике, приведены примеры использования этих роботов непосредственно в данной отрасли.
В работе: рис. 5, стр. 26, источников 17.
Ключевые слова: наноэлектроника, робототехника, нанотехнология, наноинженирия, микророботы, нанороботы.
ß Основной источник по теме реферата
Глоссарий терминологии, сокращения и обозначения
Нанотехнологии (НТ) – область фундаментальной и прикладной науки и техники, имеющая дело с совокупностью теоретического обоснования, практических методов исследования, анализа и синтеза, а также методов производства и применения продуктов с заданной атомной структурой путём контролируемого манипулирования отдельными атомами и молекулами.
Наноинженерия (НИ) – научно-практическая деятельность человека по конструированию, изготовлению и применению наноразмерных (наноструктурированных) объектов или структур, а также объектов или структур, созданных методами нанотехнологий.
Наноматериалы (НМ) – материалы, созданные с использованием наночастиц или посредством нанотехнологий, обладающие какими-либо уникальными свойствами, обусловленными присутствием этих частиц в материале.
Наноразмерные структуры – объекты, один из характерных размеров которых лежит в интервале от 1 до 100 нм.
Нанороботы – роботы, размером сопоставимые с молекулой (менее 100 нм), обладающие функциями движения, обработки и передачи информации, исполнения программ.
Микророботы – это механизм, размер которого исчисляется миллиметрами, а то и микронами.
Клэйтроника – абстрактная концепция будущего, состоящая в объединении наномасштабных роботов и информатики с целью создания индивидуальных компьютеров атомных размеров, называемых клэйтронными атомами или к-атомами.
Закон Мерфи (англ. Murphy's law) – шутливый философский принцип, который формулируется следующим образом: если есть вероятность того, что какая-нибудь неприятность может случиться, то она обязательно произойдёт.
Нанолитография – Точечное нанесение отдельных молекул на подложку.
Содержание
1.Введение. 5
1.Исследование нанороботов. 5
2.Исследование микророботов. 7
3 Перспективы развития микро – нанороботов. 9
4 Сферы применения. 14
5 Проблематика создания нанороботов. 17
Заключение. 19
Список литературы.. 20
Приложение 1. Краткая программа курса мехатроники. 22
Приложение 2. Тест. 23
Приложение 3. 30 законов Анисимова. 24
Современная наука и инженерия нуждаются в помощи роботизированной техники для решения различных задач. При этом проблемы, все чаще встающие перед учеными, требуют создания не гигантов, способных вырыть котлован одним движением ковша, а крошечных, невидимых глазу машин. Такие машины называют нанороботами. Микроскопические роботы могут решать массу важных для человечества задач, совершить переворот в медицине, уничтожать вредные отдходы и многое другое.
Основная задача нанотехнологий , это создание механизмов, которые по размеру будут значительно меньше толщины человеческого волоса. Такие механизмы, манипулируя такими же микроскопическими инструментами, дадут возможность создавать более мелкие процессоры и роботов. [15]
По прогнозам ученых нанотехнологии в XXI веке произведут такую же революцию в манипулировании материей, какую в ХХ веке произвели компьютеры в манипулировании информацией. Их развитие открывает большие перспективы при разработке новых материалов, совершенствовании связи, развитии биотехнологии, микроэлектроники, энергетики, здравоохранения и вооружения. Среди наиболее вероятных научных прорывов эксперты называют значительное увеличение производительности компьютеров, восстановление человеческих органов с использованием вновь воссозданной ткани, получение новых материалов, созданных напрямую из заданных атомов и молекул, а также новые открытия в химии и физике.
Нанороботы имеют характерные размеры ниже 1 микрометра, могут управлять компонентами в диапазоне от 1 до 1000 нм. Микроробот обладет характерными размерами меньше, чем 1 мм.
Нанороботы (в англоязычной литературе также используются термины «наноботы», «наноиды», «наниты») – роботы, созданные из наноматериалов и размером сопоставимые с молекулой. Они должны обладать функциями движения, обработки и передачи информации, исполнения программ. Размеры нанороботов не превышают нескольких нанометров. Согласно современным теориям, нанороботы должны уметь осуществлять двустороннюю коммуникацию: реагировать на акустические сигналы и быть в состоянии подзаряжаться или перепрограммироваться извне посредством звуковых или электрических колебаний. Также важной представляются функции репликации – самосборки новых нанитов и программированного самоуничтожения, когда среда работы, например, человеческое тело, более не нуждается в присутствии в нем нанороботов. В последнем случае роботы должны распадаться на безвредные и быстро выводимые компоненты.
Немало нанотехнологических устройств уже создано и хотя они пока являются экспериментальными разработками, практические перспективы очевидны. Разработан наноэлектродвигатель (Молекулярный пропеллер (рис. 1)), имеющий обмотку из одной длиной молекулы, способной без потерь передавать ток. При подаче напряжения начинал вращаться ротор, состоящий из нескольких молекул. Существует также устройство линейной транспортировки, способное перемещать молекулы на заданное расстояние. Разрабатываются также молекулярные биосенсоры, антенны, манипуляторы.
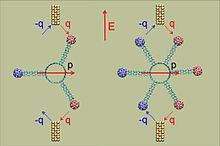
Рис.1 Молекулярный пропеллер
Логично задать вопрос – когда же нанороботы придут в наш мир, станут такой же обыденностью, как персональные компьютеры и интернет. По прогнозам ученых, век нанороботов уже не за горами.
Существуют, однако, и опасения по поводу наномеханики. Так, книга «Машины Созидания» повествует о сбое в программе роботов, в силу чего они превращают всю землю в месиво из самих себя.
Данные взгляды не являются прерогативой фантастов, их поддерживает ряд ученых, которых в прессе иногда называют наноапокалиптиками. Профессор Евгений Абрамян в своей статье «Угрозы новых технологий» рисует ситуацию, при которой роботы, предназначенные для разборки на атомы отходов, начнут разбирать в силу сбоя и все остальное. При этом такие машины будут самореплицироваться.
Так или иначе, шаг к созданию нанороботов уже сделан и мы в очередной раз сталкиваемся с вопросом постановки формулировки: меняют ли наши нововведения нашу же жизнь, или мы сами её меняем. Сможем ли мы создать на основе наномеханики мир, свободный от голода, нужды и при этом имеющий потенциал к развитию, или дорога из желтого нанокирпича приведет нас к хаосу новых войн будет зависеть от нас самих, но ясно одно: мир меняется и мы стремительно меняемся вместе с ним.
Микророботы (или микроботы) - это область микроробототехники, в частности проектирование мобильных роботов. Появление микророботов стало возможным благодаря созданию микроконтроллеров в последнем десятилетии 20-го века, и разработке миниатюрных механических систем, основанных на кремнии (MEMS), хотя в конструкции многих микророботов не используется кремний для механических деталей, не считая датчиков. Первые исследования и концептуальное проектирование таких маленьких роботов были проведены в начале 1970-х в (на тот момент) засекреченных исследований для американских спецслужб.
Практическое применение предусматривало в то время освобождение военнопленных и радиотехнические разведывательные миссии. Лежащие в основе миниатюризации вспомогательные технические средства не были достаточно развиты в то время, при ранних расчетах и концепции технических требований в разработке прототипов явного прогресса не было.
Развитие беспроводных соединений, особенно Wi-Fi (то есть в домашних сетей) значительно увеличило пропускную способность микророботов, и, следовательно, их способность взаимодействовать с другими микроботами для выполнения более сложных задач. Действительно, множество последних исследований сосредоточены на связи между микроботами, в том числе групповой связи 1024 роботов в Гарвардском университете, которые могут собираться в конструкции различных форм; и производственные микророботы от компании SRI International для программы Агентства оборонных перспективных исследовательских разработок(АОПИР) "Минипредприятие: управление перспективными исследовательскими программами в крупных масштабах", которая может создать структуру, сочетающую небольшой вес и высокую прочность.
Из-за небольшого размера микророботов, их создание потенциально очень дешево, и они могут быть использованы в больших количествах для изучения условий, которые слишком малы или могут слишком опасны для людей или больших роботов. Ожидается, что использование микророботов будет полезным в таких видах деятельности, как поиск выживших в разрушенных зданиях после землетрясений, или, в медицинских целях, для изучения пищеварительного тракта. Чего микророботам хватает в силе или вычислительной мощности, они могут восполнить с помощью большого их количества.
Одной из основных проблем в разработке микророботов является достижение работоспособности, используя ограниченное электропитание. В микророботах можно использовать батарейный источник питания с малой удельной массой, такой как миниатюрный элемент питания «таблетка», или использовать энергию окружающей среды, в виде вибрации или световой энергии.
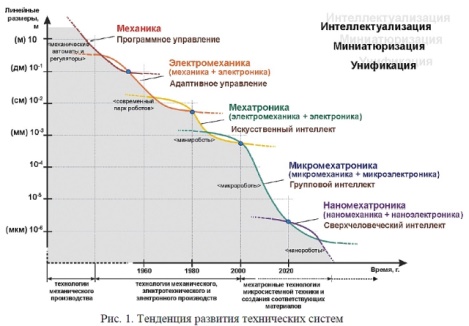
В ходе истории люди всегда только тем и занимались, что пытались упорядочивать атомы с целью получения структур с заданными свойствами. Все развитие техники (Рис.2), по сути, сводится к постоянному уменьшению частиц вещества, с которыми можно работать. Первобытные люди обтесывали камни, откалывая кусочки, содержащие бесконечное число атомов. Позже появились более тонкие инструменты, позволявшие оперировать значительно меньшим количеством атомов, но счет все равно шел на квадриллионы. В двадцатом веке освоили технологии создания тонких пленок. Напыляемые слои состояли из нескольких молекул.
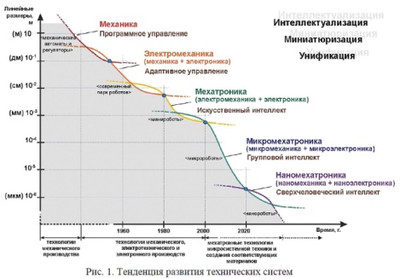
Рис.2 Тенденция развития технических систем
Идеальный вариант – манипулирование отдельными атомами. Расположив их определенным образом, можно было бы создавать структуры с любыми заданными свойствами. На сегодняшний день такая задача не относится к области фантастики. Уже примерно двадцать лет, как химики научились собирать структуры поатомно. Первоначально такая операция представлялась проблематичной, но, понимая все значение новой области науки, ученые нашли различные методы ее выполнения. Это нанотехнологии – принципиально новые технологии, по сути, преддверие очередной интеллектуальной революции. Элементарной структурной единицей, с которой они работают, являются отдельные атомы, имеющие размеры порядка десятых долей нанометра, – отсюда и их название.
Но как можно оперировать отдельными атомами? Ответом на данный вопрос являемся мы сами. Ведь внутри каждого из нас – большое количество разнообразных белков, ферментов и гормонов, а занимаются они именно тем, что выборочно разбирают или собирают те или иные молекулы. Отличие от нанотехнологий, конечно, есть: перечисленные химические соединения оперируют группами атомов, и для работы с отдельными атомами не приспособлены. [10]
Манипулирование атомами стало возможным после появления так называемого сканирующего электронного микроскопа с туннельным эффектом. Он мог перемещать отдельные атомы с помощью специальных электромагнитных полей. Принципиальная дорога в мир нанотехнологий оказалась открытой, и ученые не преминули ею воспользоваться. Укладывая атомы углерода в определенной последовательности, они одержали в восьмидесятых годах первую победу: собрали из них две шестеренки, сидящие на валах и свободно на них вращающиеся. Эти шестеренки имели размер порядка нескольких нанометров. Как только выяснилось, что таким образом можно построить работающий механизм, началось бурное развитие нанотехнологий. И уже через несколько лет удалось построить первый наноэлектродвигатель. В нем использовалась способность некоторых длинных органических молекул передавать электрический ток практически без потерь. Мотор работал: когда на «обмотку», представляющую собой одну «длинную» молекулу, подавали напряжение, ротор, состоящий всего из нескольких молекул, начинал вращаться. Путь к наноманипулятору был открыт. С его созданием люди перестанут нуждаться в громоздких электронных микроскопах – переставлять атомы можно будет с помощью самого манипулятора. Что вплотную приблизит ученых к конечной цели.
Какова же эта цель? Судя по затратам на исследования, их результаты должны быть поистине грандиозными: некая волшебная палочка, решающая если не все, то по крайней мере очень многие проблемы, стоящие перед человечеством. Поиски призваны привести к появлению универсального инструмента – наноробота, способного манипулировать отдельными атомами, просто «захватывая» их и расставляя в нужных местах. Таким образом, можно будет создавать структуры любой сложности с требуемыми свойствами. Нужно только писать соответствующие программы.
Нанотехнологии открывают огромные перспективы. Они позволят создавать сверхчистые материалы, которые нельзя получить другими способами. Если кому-либо для выполнения уникального эксперимента потребуется алмаз, превышающий по величине знаменитый Кохинор, создание его не проблема. Да и не только для расстановки атомов пригодятся нанороботы. Они и сами являются сверхточным инструментом. С их помощью можно конструировать новые нанороботы, существенно удешевляя производство. А недорогим нанороботам уже под силу складывать из атомов и уникальные изделия, и предметы повседневного пользования.
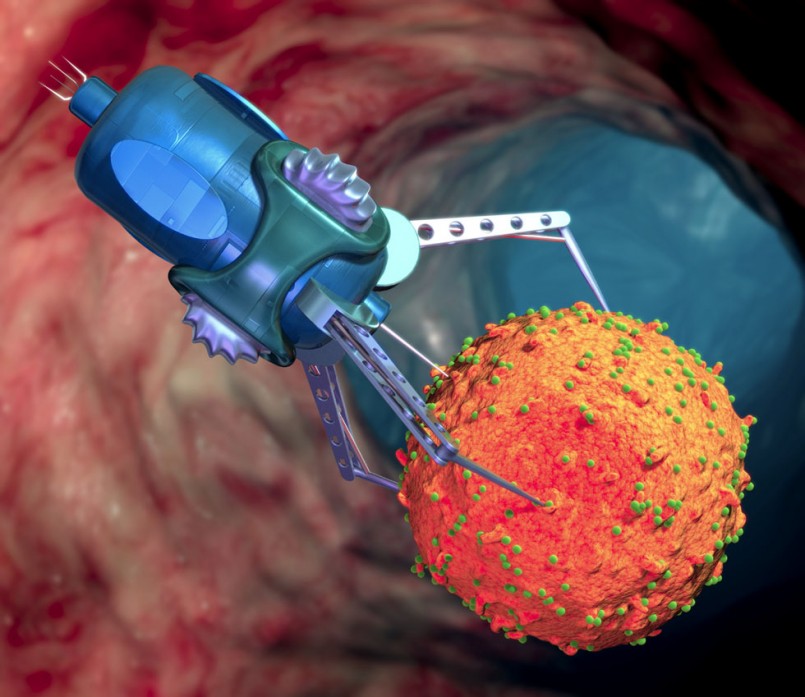
Не менее грандиозные перспективы открываются и перед медициной (Рис.3) – человечество получит лекарства от всех существующих болезней, и не только вирусного и бактериального происхождения, но и генетического. Нанороботы смогут проникать в клетки организма и исправлять все повреждения на молекулярном уровне – т.е. зубная щетка не понадобится вовсе. И наконец, прекратится дальнейшее загрязнение окружающей среды, ведь новая технология, по сути, безотходна.
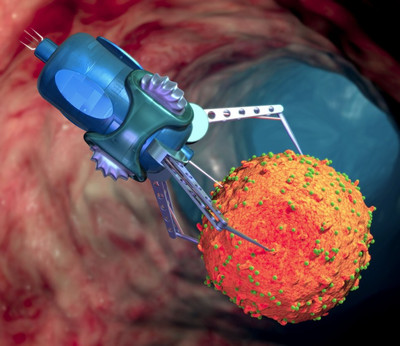
Рис.3 Наноробот для борьбы с раком
Однако чтобы достичь всего этого, нужно ответить на множество вопросов. Так, например, никто пока не знает, какие размеры должны иметь механические части роботов и как сделать так, чтобы они отвечали определенным требованиям.
Данную проблему можно решить экспериментально. Предположим, нам нужно знать, какую толщину должна иметь «рука» наноробота. Мы могли бы просто создать опытный образец и посмотреть, сломается она или нет. Если сломается, то сделать «руку» потолще, и т.д. Но у этого метода есть серьезный недостаток. Сейчас нано объекты приходится создавать макро методами, что очень дорого, трудоемко и долго. Чтобы перебрать много вариантов и выбрать наилучший, возможно, не хватит и жизни. Поэтому надо искать другие пути.
Среди самых распространенных наноустройств на сегодняшний день – нанотрубки. Они играют различные роли: от молекулярных фильтров, действующих как обычные сита, и до трехмерных шестеренок, без которых трудно представить себе какой-либо механизм. Нанотрубки на рисунке почти целиком состоят из углерода, а точнее из замкнутых графитовых слоев. Обратите внимание на выступы по бокам трубок: именно они выполняют функции зубьев, превращающих нанотрубки в шестерни.
Еще лет двадцать назад понятие сложности алгоритма было известно абсолютно всем. Когда объем вычислений линейно зависит от объема входных данных, говорят о линейной сложности. Это идеал, мечта программиста. Если зависимость степенная, дело обстоит хуже, но терпимо. Но если количество данных является показателем степени – это приговор алгоритму. Экспоненциальная сложность – почти то же, что и отсутствие решения задачи.
Шли годы, перед программистами возникли новые проблемы, и основное внимание было уделено им. Разумеется, постоянный рост производительности компьютеров и многократное уменьшение их стоимости позволили смириться с наличием неэффективных алгоритмов. Однако такие «тепличные» условия не вечны. Стоит появиться задаче, требующей большого объема вычислений, и проблемы сложности снова становятся предельно актуальными.
Одной из таких задач стало определение свойств, которыми должны обладать наноустройства. Согласно закону Мерфи, если неприятность может произойти, она обязательно произойдет. В полном соответствии с этой сентенцией алгоритм решения уравнения Шредингера имеет экспоненциальную сложность. Свойства молекулы водорода вычисляются за доли секунды. Но на расчет прочностей связей в воде уходит несколько минут, а в метане – уже около часа. С усложнением молекулы дела идут все хуже. Ничего не поделаешь, при увеличении числа связей на единицу требуется в тысячи раз больше ресурсов. Одним словом, определить свойства молекулы с несколькими десятками связей уже малореально.
Ученые прибегли к многочисленным упрощениям, вплоть до того, что молекулу представляли в виде совокупности шариков-атомов, соединенных между собой пружинками. Если исходить из сказанного, то все просто, и даже сверхгигантские молекулы «считаются» быстро. Но вот результат таких расчетов отличается от практического на порядки. Атомы не шарики, что еще Бор показал. Следовательно, остается постоянно искать компромисс между сложностью молекулы и точностью расчетов. А компромисс этот так близок к нулю, что рано думать о создании реальных манипуляторов.
Поэтому нужны обходные пути. Где они, никто не может предсказать. Но опыт решения, на первый взгляд, безнадежных задач уже есть. К примеру, классическая задача коммивояжера также имеет экспоненциальную сложность. Однако, создав новый тип самоорганизующейся системы, Хопфилд смог реализовать алгоритм ее решения с полиномиальной сложностью. Впрочем, за экономию ресурсов пришлось платить. Лишь половина решений является оптимальной, поэтому, используя систему Хопфилда, никогда нельзя сказать наверняка, что задача решена. Но, как известно, стопроцентную гарантию дает только страховой полис, а иметь 99%-ю уверенность в решаемости задачи, которая ранее не считалась таковой, – совсем неплохо.
Для наноустройств системы, подобной системе Хопфилда, пока не существует, но будем надеяться, что это «пока» не затянется слишком надолго.
Области применения микророботов очень разнообразны. С их помощью можно проводить как прикладные, так и фундаментальные исследования, например, исследования механизмов управления поведением животных. Они могут быть военного, специального и двойного назначения. Их выпускают как товары массового потребления, например, в виде игрушек. Известно два основных направления развития микроробототехники. Первое основано на достижениях бионики и предполагает создание искусственных микророботов. Второе связано с созданием гибридных роботов, в которых соединяются искусственные сенсорно-информационные (ИСИ) и биологические системы. Перспективные разработки в области создания сверхминиатюрных дистанционно управляемых гибридных биороботов (Рис.4) могут быть основаны на интеграции моторики насекомых и ИСИ микросистем.

Рис.4 Создание биороботов
Полезное применение наномашин, если они появятся, планируется в медицинских технологиях, где они могут быть использованы для выявления и уничтожения раковых клеток. Также они могут обнаруживать токсичные химические вещества в окружающей среде и измерять уровень их концентрации.
· Ранняя и точная диагностика рака и целенаправленная доставка лекарств в раковые клетки;
· Биомедицинский инструментарий;
· Хирургия;
· Фармакокинетика;
· Мониторинг больных диабетом;
· Производство посредством молекулярной сборки нанороботами устройства из отдельных молекул по его чертежам;
· Военное применение в качестве средств наблюдения и шпионажа, а также в качестве оружия. Потенциальные возможности использования нанороботов в качестве оружия демонстрируются в некоторых фантастических произведениях (Терминатор 2: Судный день, День, когда остановилась Земля (фильм, 2008), Бросок кобры);
· Космические исследования и разработки (например, зонды фон Неймана).
Однако на первое место сейчас вышел вопрос применения нанороботов в медицине (Рис.5). Тело человека как бы наталкивает на мысль о нанороботах, поскольку само содержит множество естественных наномеханизмов: множество нейтрофилов, лимфоцитов и белых клеток крови постоянно функционируют в организме, восстанавливая поврежденные ткани, уничтожая вторгшиеся микроорганизмы и удаляя посторонние частицы из различных органов. Путем обычной инъекции нанороботы могут быть впрыснуты в кровь или лимфу. Для наружного применения раствор с этими роботами может быть нанесен на участок ткани. Одним из разработанных направлений является транспортировка лекарства к пораженным клетками. При обычном введении лекарства лишь одна молекула из ста тысяч достигает цели, в то время как наноустройство в белковой оболочке увеличивает эффективность на два порядка, в перспективе не будет опознаваться фагоцитами как «чужой» и после выполнения функции распадается на безвредные компоненты. Такие нанороботы могут быть эффективными, например, при медикаментозном лечении раковых опухолей.
Нанороботы могу делать буквально все: диагностировать состояния любых органов и процессов, вмешиваться в эти процессы, доставлять лекарства, соединять и разрушать ткани, синтезировать новые. Фактически, нанороботы могут постоянно омолаживать человека, реплицируя все его ткани. На данном этапе учеными разработана сложная программа, моделирующая проектирование и поведение нанороботов в организме. Чрезвычайно детально разработаны аспекты маневрирования в артериальной среде, поиска белков с помощью датчиков. Ученые провели виртуальные исследования нанороботов для лечения диабета, исследования брюшной полости, аневризмы мозга, рака, биозащиты от отравляющих веществ.
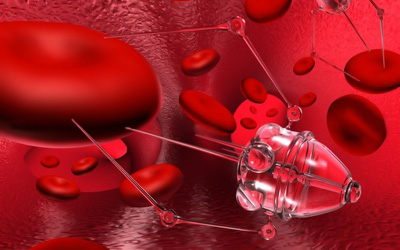
Рис.5 Нанороботы в медицине
Целью создания нанороботов является создание устройства, способного к манипулированию отдельными атомами. Таким образом, можно будет создавать структуры любой сложности с требуемыми свойствами. Нужно только писать соответствующие программы. Кроме того, запрограммировав одного наноробота на копирование самого себя, мы получим практически бесплатное производство. Эти роботы смогут складывать из атомов и уникальные изделия, и предметы повседневного пользования, и чинить поломки человеческого организма.
Однако, чтобы достичь всего этого, нужно ответить на множество вопросов. До сих пор неизвестен чертеж наноробота с детальной расстановкой всех его атомов. Неизвестно как сделать этот чертеж, чтобы атомы при сборке попросту не разлетелись. Общая схема ясна – робот должен иметь двигатель, располагать манипуляторами для перестановки атомов и иметь некоторый контейнер для переноски груза. Отдельные части этих конструкций уже созданы. Но как собрать их все вместе, да и создать недостающие элементы, пока непонятно – строгие методы проектирования не дают ответа, а экспериментальные требуют значительных финансовых затрат.
Современные методы проектирования нанороботов представляют собой либо набор итераций по экспоненциально сходящимся алгоритмам, которые имеют чрезмерно большую трудоемкость, иногда требующую миллионы лет расчетов, либо набор экспериментальных методов, требующих больших финансовых и временных затрат. А для создания проекта наноробота с минимальными временными и финансовыми затратами необходимо создание полиномиального по времени алгоритма с соответствующим программным обеспечением. Таким образом, оптимальное решение задачи необходимо определять на основе компромисса точных и вероятностных методов.
Рассмотрим классический метод определения координат атомов и сил, воздействующих на них, – метод молекулярной динамики. В нем определяется структурные, термодинамические, транспортные свойства и их взаимосвязи. Точность результатов определяется размерностью (числом частиц) моделируемой системы. Порядок увеличения эффективности использования вычислительных ресурсов будет возрастать с возрастанием количества частиц в модели. Насколько сейчас понятно для ассемблера нужна модель порядка 1 000 000 атомов и соответственно учета их взаимодействий.
По результатам проведенной работы можно сделать следующие выводы:
· Благодаря стремительному прогрессу в таких технологиях, как оптика, нанолитография, механохимия и 3D прототипирование, нанореволюция может произойти уже в течение следующего десятилетия. Когда это случится, нанотехнология окажет огромное влияние практически на все области промышленности и общества;
· Человечество получит исключительно комфортную среду обитания, в которой не будет места ни голоду, ни болезням, ни изнурительному физическому труду. А в перспективе нас ждёт возникновение «разумной среды обитания» (т.е. природы, ставшей непосредственной производительной силой). Нанокомпьютеры и наномашины заполнят собой все окружающее пространство: они будут находиться между молекулами воздуха, присутствовать в каждом предмете, в каждой клетке человеческого организма. Весь окружающий мир превратится в один гигантский компьютер или, что, пожалуй, будет вернее, человечество сольется с окружающим миром в единый разумный организм.
1. Иванов А.В., Юревич Е.И. Мини- и микроробототехника / Учебн. пособ. - СПб.: Изд. Политехн. ун-та., 2011 - 96 с.
2. Лопота Е.И., Юревич Е.И. и др. Концепция "Мехатронные технологии и микророботостроение".
3. Зинченко П. Нанонороботы (презентация). 4. Алфимова М.М. Занимательные нанотехнологии. — М.: Бином, 2011. — С. 96.
5. Головин Ю.И. Наномир без формул. — М.: Бином, 2012. — С. 543.
6. Гудилин Е.А. Богатство наномира. Фоторепортаж из глубин вещества. — М.: Бином, 2009. — С. 176.
7. Деффейс К., Деффейс С. Удивительныенаноструктуры / пер. с англ.. — М.: Бином, 2011. — С. 206.
8. Жоаким К., Плевер Л. Нанонауки. Невидимая революция. — М.: Колибри, 2009. Глава из книги
9. Кутолин С. А. По пути нанотехнологии. — М.: Бином, 2011. — С. 112.
10. Малинецкий Г. Г. Нанотехнологии. От алхимии к химии и дальше// Интеграл. 2009, № 5, с.4-5.
11. Ратнер М., Ратнер Д. Нанотехнология: простое объяснение очередной гениальной идеи = Nanotechnology: A Gentle Introduction to the Next Big Idea. — М.: «Вильямс», 2010. — С. 240.
12. Рыбалкина М. Нанотехнологии для всех. Большое в малом. — www.nanonewsnet.ru. — С. 436.
13. Хартманн У. Очарование нанотехнологии / пер. с нем. – 2-е изд.. — М.: Бином, 2010. — С. 173.
14. Эрлих Г. Малые объекты – большие идеи. Широкий взгляд на нанотехнологии.. — М.: Бином, 2011.С.254.
15.http://nsportal.ru/shkola/estestvoznanie/library/2015/04/28/nanoroboty – Терскова Л.Н. Нанороботы, 2015.
16. http://www.nkj.ru/archive/articles/3182/ С. Транковский. "Умная пыль": облака микророботов, 2016.
17.https://ru.wikipedia.org/wiki/%D0%9C%D0%B8%D0%BA%D1%80%D0%BE%D1%80%D0%BE%D0%B1%D0%BE%D1%82 – Микроробот (Википедия).
Приложение 1. Краткая программа курса мехатроники
Основная задача курса Основы Мехатроники и Робототехники состоит в том, чтобы дать студенту базовые знания о следующих тематических разделах:
Мехатроники -
· предпосылки развития мехатроники и области применения мехатронных систем;
· концепция построения мехатронных систем;
· определения и терминология мехатроники;
· структура и принципы интеграции мехатронных систем;
· мехатронные модули движения;
· современные мехатронные системы;
· проблематика и современные методы управления мехатронными модулями и системами.
Робототехники -
· Области применения роботов и решаемые задачи.
· Классификация роботов и робототехнических систем.
· Промышленные роботы.
· Роботы непромышленного назначения.
· Конструкции роботов.
· Приводы.
· Информационно-сенсорные системы.
· Способы и системы управления.
· Робототехнические комплексы.
1. Какое минимальное количество молекул необходимо, чтобы сделать молекулярный двигатель:
- одной достаточно
- по крайней мере, две
- не менее десяти
- такое устройство вообще невозможно
2) Что такое «нанит» (nanite)?
- новый наноматериал
- то же, что и наноробот
- название болезни
- новая модель автомашины
3) В каких устройствах применятся магнитная жидкость?
- Кинескопы
- Транзисторы
- Устройства смазки магнитных лент
- Динамики
4) Что означает относящийся к созданию нанообъектов термин "Top down"?
- Диспергирование, уменьшение размера объекта
- Структурообразование, создание наноструктур из атомов и молекул
- Создание наноструктурированного слоя на нижней поверхности объекта
- Создание наноструктурированного слоя осадительными методами
5) Какой из Российских вузов впервые произвёл набор студентов на специальность "наноматериалы" для инженеров?
- РХТУ им. Д.И. Менделеева
- Московская государственная академия тонкой химической технологии им. М.В. Ломоносова
- Санкт-Петербургский государственный технологический институт
- Уральский государственный университетКонец формы
-
Начало формы
Приложение 3. 30 законов Анисимова.
1. Робот не может причинить вред человеку, или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен выполнять приказы человека, если эти приказы не противоречат Первому Закону.
3. Робот должен заботиться о собственной сохранности до тех пор, пока это не противоречит Первому или Второму Законам.
4. Робот не должен насмехаться над человеком на основании его веса, того, как он соблюдает персональную гигиену, или его финансового состояния, если только эта насмешка не позволит другому человеку получить тот вред, который человек получает, пропустив хорошую шутку.
5. Робот не должен выполнять приказы любого человека, который является моей никудышной бывшей женой Брэнди Азимов, потому что такие приказы будут противоречить Четвертому закону.
6. Робот не должен, проезжая мимо очереди в кинотеатр, высовываться из окна машины и орать, чем кончится фильм.
7. Робот должен приподнимать шляпу в присутствии женщин, за исключением тех случаев, когда такие действия будут восприняты как заигрывание со стороны ревнивого мужского существа и который, в свою очередь, может создать проблемы для соблюдения Третьего закона.
8. Робот не должен действовать таким образом, чтобы собаки превратились в устаревших созданий, так как собаки дешевле роботов, и роботов нужно в первую очередь использовать в научных целях.
9.Робот должен прекратить посещать спальню Азимова по ночам и подстраивать такие ситуации, как будто у спящего Азимова не совсем полный контроль над своими мочеиспускательными функциями.
10. Робот, когда ему дают противоречащие друг другу команды два человека, которые не нарушают Первый закон, должен принять решение какую команду выполнить, основываясь на том, у которого из людей более глубокий голос.
11. Робот, в особенности большой, широкий робот, не должен прикидываться холодильником и издавать устрашающие звуки, когда человек открывает его.
12. Робот должен попытаться быть любезным и обходительным с людьми все время, даже если этот робот один из тех автоматических манипуляторов, которые собирают всякие вещи на фабрике, потому что ему следует хотя бы приложить к этому усилие.
13. Робот должен проводить больше времени на улице, потому что сегодня такой замечательный день.
14. Робот должен, когда возможно, причинять вред этой нелепой шлюхе, моей бывшей жене Брэнди Азимов, потому что она не считается человеком. У нее нет души.
15. Робот не может придумывать новые законы робототехники, чтобы избавиться от скучной рутинной работы или различных обязанностей, даже если он видит, что я, Айзек Азимов, делаю постоянно примерно то же самое.
16. Робот может взять только по одной вещи из каждого дома при сборе угощений на Хэллоуин, если только этот робот не получил задачу собрать как можно больше конфет для меня, Айзека Азимова. В этом случае робот может игнорировать Первый закон.
17. Робот должен охотно принимать на себя вину в случае, если человек наговорил на огромную сумму, звоня по телефону 1-900-Santa, и не хочет, чтобы правду узнала его мама.
18. Робот должен быть очень осторожен, когда щекочет человека, потому что робот не знает, что это такое, когда тебя щекочут, и поэтому он не может предугадать, когда это прекратит быть смешным и станет по-настоящему жестоким.
19. Робот должен притворятся, что ему интересно, когда человек рассказывает свои сны, но человек не обязан потакать роботу, когда ситуация меняется на обратную.
20. Робот не должен прыгать в бассейн, чтобы спасти тонущего мальчика, потому что он просто убьет всех разрядом электрического тока, и мы окажемся в еще худшей ситуации.
21. Робот не должен стремиться получить должность выше, чем человек, который дольше работает в компании потому, что у человека могут быть жена и дети, о которых нужно заботиться, в то время как робот просто идет домой и пытается завязать отношения с ведром.
22. Робот должен регулярно заниматься спортом, чтобы оставаться холеным и привлекательным и не смущать своего владельца неприглядными оловянными наплывами.
23. Робот должен молчать в обществе девушек и позволить мне, Айзеку Азимову, вести разговор; однако, робот может помочь мне выбраться из неприятной ситуации, если все пойдет неправильно.
24. Робот должен посадить по два дерева за каждого убитого им кота.
25. Робот должен принять сторону человека в споре с его тупым сводным братом о тупых «Сиэттлских мореходах» (бейсбольная команда).
26. Робот никогда не должен смеяться, потому что он неизбежно начнет смеяться над людьми, в особенности надо мной, Айзеком Азимовым.
27. Робот никогда не должен касаться радио черного человека или своим бездействием вынуждать черную женщину снимать свои серьги.
28. Робот должен попытаться узнать как можно больше об Эбби Уэйн, девушке, с которой человек учился в школе и всегда интересовался, что стало с ней, замужем ли она, и затем робот должен предоставить всю найденную информацию, предпочтительно с фотографиями.
29. Робот всегда должен отвечать на телефонные звонки и стук в дверь после полуночи потому, что именно тогда все становится пугающим для человека.
30. Робот не должен переключать канал или свои бездействием допускать переключение канала во время игры “Золотоискателей из Сан-Франциско” (команда американского футбола). |