Аннотация
В данной работе рассмотрены электромеханические системы МЭМС И НЭМС , имеющие непосредственное отношение к наноинженерии, а именно к наноэлектронике. Рассмотрены их свойства и применение. Освещены основные понятия о робототехнике, приведены примеры использования этих электромеханических систем непосредственно в данной отрасли.
В работе: рис. 10, стр. 16, источников 13.
Ключевые слова: МЭМС, НЭМС, наноэлектроника, робототехника.
Глоссарий терминологии, сокращения и обозначения
Нанотехнологии - область фундаментальной и прикладной науки и техники, имеющая дело с совокупностью теоретического обоснования, практических методов исследования, анализа и синтеза, а также методов производства и применения продуктов с заданной атомной структурой путём контролируемого манипулирования отдельными атомами и молекулами.
Наноинженерия (НИ) – научно-практическая деятельность человека по конструированию, изготовлению и применению наноразмерных (наноструктурированных) объектов или структур, а также объектов или структур, созданных методами нанотехнологий.
Наноматериалы - материалы, созданные с использованием наночастиц или посредством нанотехнологий, обладающие какими-либо уникальными свойствами, обусловленными присутствием этих частиц в материале.
Наноразмерные структуры – объекты, один из характерных размеров которых лежит в интервале от 1 до 100 нм.
МЭМС – микроэлектромеханические системы.
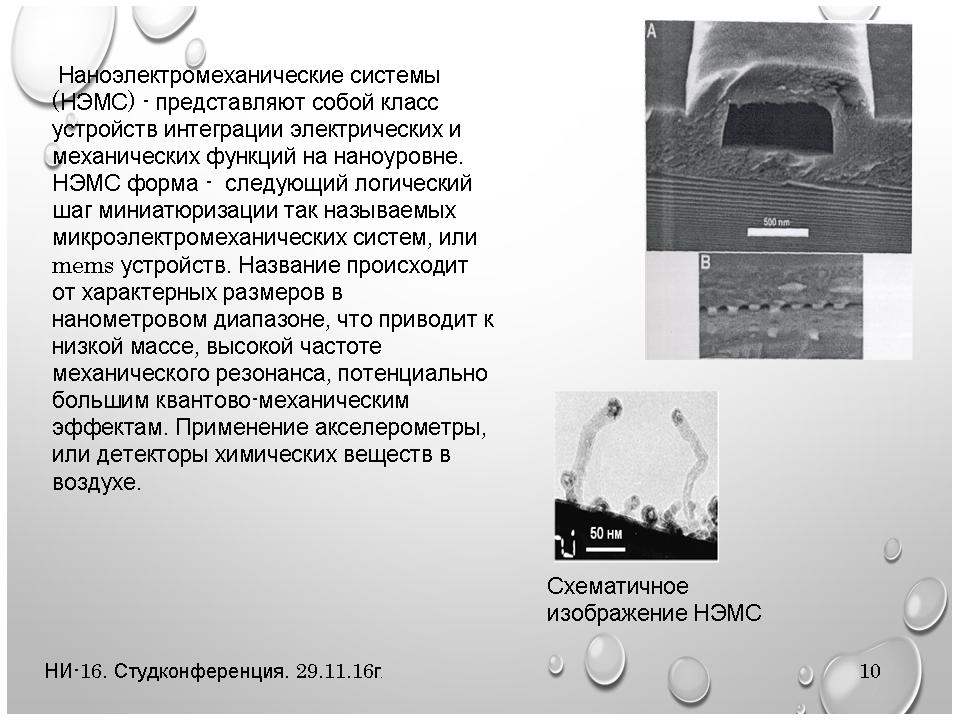
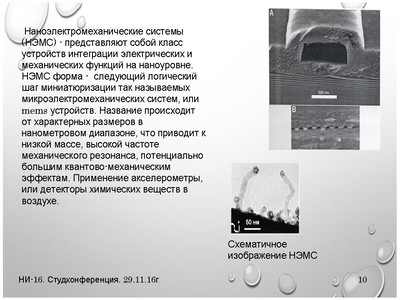
НЭМС – наноэлектромеханические системы.
Робототехника — прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой интенсификации производства.
Робот — автоматическое устройство, созданное по принципу живого организма, предназначенное для осуществления производственных и других операций, которое действует по заранее заложенной программе и получает информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком. При этом робот может как иметь связь с оператором (получать от него команды), так и действовать автономно.
Нанороботы - роботы, размером сопоставимые с молекулой (менее 100 нм), обладающие функциями движения, обработки и передачи информации, исполнения программ.




ЗАКЛЮЧЕНИЕ
В заключение еще раз можно отметить, что микро- и нано-электромеханические системы обеспечат выход технологии на новый уровень, и, по-видимому, уже в ближайшее время прочно займут свое место в современной науке. С помощью развития этих технологий появится возможность создания роботов, которые смогут доставлять лекарства непосредственно в пораженные органы. Это поможет совершить прорыв мировой медицине, лечение тяжелых заболеваний будет возможным.
Когда это случится, нанотехнология окажет огромное влияние практически на все области промышленности и общества.
Человечество получит исключительно комфортную среду обитания, в которой не будет места ни голоду, ни болезням, ни изнурительному физическому труду. А в перспективе нас ждёт возникновение «разумной среды обитания» (т.е. природы, ставшей непосредственной производительной силой). Нанокомпьютеры и наномашины заполнят собой все окружающее пространство: они будут находиться между молекулами воздуха, присутствовать в каждом предмете, в каждой клетке человеческого организма. Весь окружающий мир превратится в один гигантский компьютер или, что, пожалуй, будет вернее, человечество сольется с окружающим миром в единый разумный организм.
Список литературы:
- В.А. Быков Нанотехнологии в МЭМС и НЭМС, микро- и наноэлектронике: современные технологические и аналитические возможности [Текст] // Приложение к журналу «Вестник РГРТУ». Рязань, 2009. — №4. — 4 с.
- А.В. Иванов , Е.И. Юревич Мини- и микроробототехника [Текст] // Учеб. пособ. — СПб.: Изд-во СПбГПУ. — 2011. — 96 с.
- О. Коленченко Как смартфоны чувствуют мир [Текст] // Научная статья. — 2014. — 9 c.
- Саленко Д.С. История развития и области применения технологии MEMS [Текст]// Научная статья. — Новосибирс ФГБОУ ВПО НГТУ. —2013. — 7 с.
- И. Е. Лысенко Учебный курс по компонентам микросистемной техники [Текст]// Таганрог,ТГТУ. —2009. — 120 с.
- Мальцев П.П. Нанотехнологии, Наноматериалы, Наносистемная техника, Мировые достижения, [Текст]//М. Техносфера. — 2008. —438 с.
- С.Сысоева МЭМС-технологии Простое и доступное решение сложных системных задач [Текст] // Научная статья. Электроника НТБ. — 2009.
- В. Алексеев Новые многофункциональные МЭМС-датчики движения [Текст] // Научная статья. — СПБ.Издательство Файнстрит —2015. — 4 с.
- Распопов В.Я. Микромеханические приборы [Текст] // Учебное пособие. - М.: Машиностроение, 2007. - 400 с.
- https://ru.wikipedia.org/wiki/Робототехника — Робототехника.
- https://ru.wikipedia.org/wiki/Микроэлектромеханические_системы — МЭМС.
- Борисенко, В.Е. Наноэлектроника [Текст] / В.Е. Борисенко, А.И. Воробьева, Е.А. Уткина. – М.: Бином. Лаборатория знаний, 2009. – 223 с.
- Нанотехнологии в электронике [Текст] / под ред. Ю.А. Чаплыгина. -М.: Техносфера. 2005. – 446 с.
Приложение 1. Контрольные вопросы
- В каком году были впервые продемонстрированы нанороботы на основе ДНК, способные перемещаться в пространстве:
- В 2003г.
- В 2014г.
- В 2010г.
- В 1997г.
- Из приведенных ниже размеров выберите те, которые удовлетворяют понятию наноразмерные системы:
- От 1 до 10 м
- От 10 до 100 нм
- 1000 нм
- От 100 до 1000 нм
- Все ответы являются верными
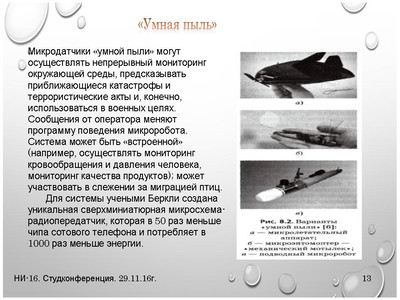
- Укажите размер сверхминиатюрной микросхемы-радиопередатчика для системы «Умная пыль»:
- 100 см
- От 1 до 10 нм
- В 50 раз меньше размера чипа сотового телефона
- Размером с чип сотового телефона
- 100 нм
- В каком году профессор Роберт Блайк из Висконсина, США, представил рабочий электромеханический маятник, который получил название "Наномеханический осциллятор Блайка"
- В 1997г.
- В 2006г.
- В 1994г.
- В 2001г.
- В 2000г.
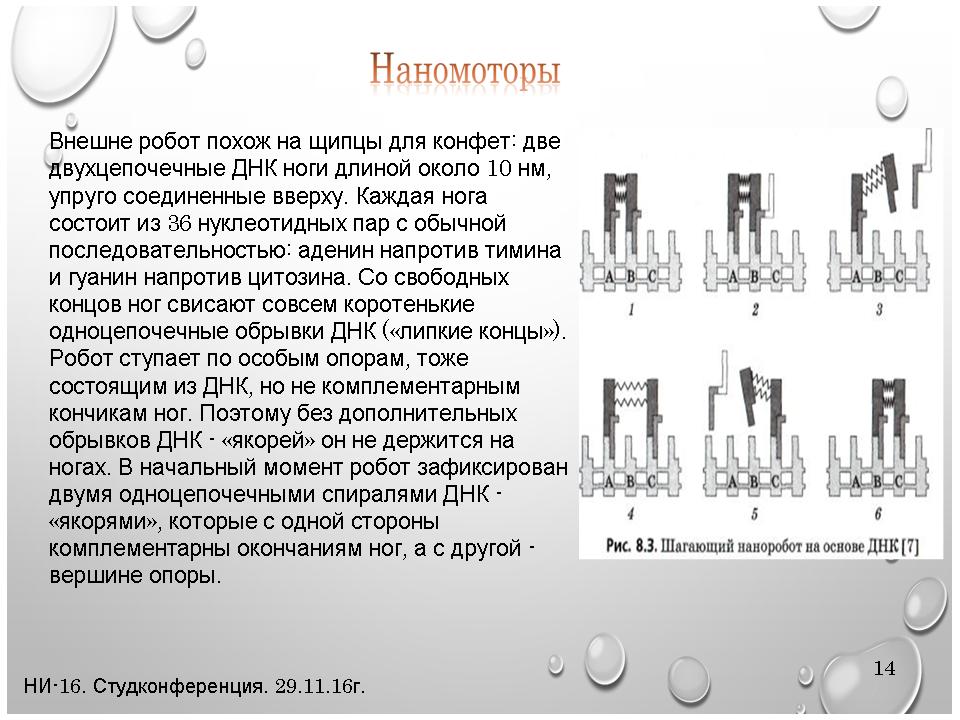
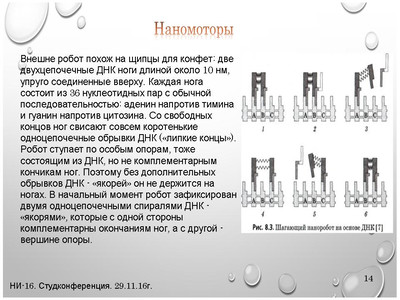
- Из скольки нуклеотидных пар состоит каждая нога двуногого шагающего наноробата:
- Из 43
- Из 50
- Из 32
- Из 37
- Из 36
|