НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ЯДЕРНЫЙ УНИВЕРСИТЕТ МОСКОВСКИЙ ИНЖЕНЕРНО-ФИЗИЧЕСКИЙ ИНСТИТУТ (НИЯУ МИФИ)
Факультет: Автоматика и электроника
Кафедра: Микро- и наноэлектроника
Морской спецназ в сети:
пакеты над и под водой
Группа: А9-09
Подготовил: Власов А. В.
Horror20@yandex.ru
Преподаватель: доцент Лапшинский В. А.
27.10.2012 21:59
Версия 2
Москва 2012
Содержание
- Используемые сокращения
- Введение
- Передача пакетов над водой
- Связь подводных лодок
- Явление гидроакустики
- Подводные акустические сети
- Гидроакустическая связь
- Гидроакустические сети
- Характеристики гидроакустической сети
- Список литературы
Введение
Известна старая поговорка «Связь — нерв армии». Действительно, неоднократно история преподносила горькие уроки пренебрежения связью. В настоящее время огромную роль в военных конфликтах играют силы специального назначения. Для групп разведки и ДРГ связь с Большой землей имеет огромное значение. Без преувеличения, это вопрос жизни и смерти для находящейся на вражеской территории горстки, пусть и обученных воевать, бойцов. Связь — это действительно нервы… нервы спецназа. Штатная ситуация: отряд СпН выполняет СБЗ вдали от ППД. Отряд обеспечен связью со своим штабом в ППД, с взаимодействующими органами и местным штабом управления силами и средствами. В данной системе связи особых проблем нет, войска обеспечены средствами для решения подобной задачи. Связь со своими группами, связь внутри групп, оперативная связь с должностными лицами отряда на территории ПВД — все это проблемы самого отряда, точнее, группы связи отряда. Рассмотрим ДРГ, действующую в отрыве от ПВД на удалении 20–30 км. Данная ДРГ должна иметь следующие средства связи:
- УКВ или КВ носимую станцию для связи с КШМ ПВД, взаимодействующими органами (части федеральных сил, находящиеся в этом районе, артиллерия и авиация);
- УКВ станции на каждого бойца ДРГ для внутренней связи в группе;
- аппаратуру ЗАС носимого типа, если основная станция не позволяет передавать развединформацию (не имеет встроенного блока засекречивания, не работает в режимах ТМ и ППРЧ).
Исходя из особенностей применения ДРГ, радиостанции должны удовлетворять следующим требованиям:
- устойчивость связи;
- надежность;
- противодействие помехам и РЭБ противника;
- скрытность связи;
- защищенность связи;
- малые габариты и вес;
- простота в обращении.
Рис. 1. Радиостанции Р-168–0,1 УН
Рассмотрим каждый пункт.
Устойчивость связи.
Мощности передатчика должно хватать, чтобы обеспечить устойчивую радиосвязь во всех режимах на заданном удалении от ПВД.
Надежность.
Крепкий корпус, возможность работы под водой, пылезащищенность, надежные и изолированные контакты и гарнитура. Так, в Осетии, в августе 2008 года довелось столкнуться с плохой изоляцией контактов. При небольшой влажности (легкий туман, дождь) при нажатии тангенты и постановке радиостанции Р-168–0,1 УН на передачу, радист получал разряд в голову. Этот фактор крайне важен, ведь произвести такой ремонт вне мастерской нереально. Максимум, что можно сделать, это срастить оборванный провод.
Противодействие помехам и системам РЭБ противника.
Август 2008 года. Грузинские средства РЭБ сильно мешали жить. Первое время невозможно было работать на установленных частотах. Грузинские спецы забивали их помехами, шумами и своим матом, грозили по уровню излучения запеленговать нас и уничтожить артиллерией. Ситуация изменилась кардинально, когда мы стали работать на радиостанциях комплекса Р-168 «Акведук». Данный комплекс позволял использовать режимы ТМ и ППРЧ. Средства радиосвязи спецподразделений должны работать в данных режимах.
Скрытность связи.
На простейших переносных станциях типа «Эрика» и «Радиус» для этого установлены маскираторы. Но они выполняют функцию аппаратуры засекречивания временной стойкости. Для разведгрупп важно скрыть не только содержание передаваемой информации, но и сам факт передачи. В этом случае вновь на помощь приходит режим ППРЧ: перескок радиочастот, осуществляемый по алгоритму, известному лишь в нашей радиосети (направлении), станция передает информацию на разных частотах заданное количество раз в секунду.
Защищенность связи.
Данное условие выполняется наличием в аппаратуре платы или блока технического маскирования (режим ТМ в комплексе «Акведук»), режимом ППРЧ и носимым блоком аппаратуры ЗАС («Историк», «Аргунь» и т. д.). Кроме того, применяются таблицы формализованных сообщений («Снег-2», ТДР-84 и др.). В иностранных станциях, например в немецком комплексе М3 TR, такие таблицы не нужны, поскольку есть возможность отправки формализованных сообщений (наподобие сервиса SMS). Упрощен способ сообщения своего местоположения: все станции данного комплекса объединены в одну информационную сеть, каждая станция имеет свой блок GPS. Все данные отражаются на ноутбуке оператора сети. Нажатием двух кнопок координаты могут быть адресно отправлены на любую станцию сети. На наших комплексах пока эта функция отсутствует, что прискорбно.
Малые габариты и вес.
С этим все понятно. Большой вес станций уменьшает количество боезапаса и другого полезного имущества, а также, естественно, силы бойца при дальних переходах.
Простота обучения и обращения.
Этот пункт особенно важен в условиях подразделений, комплектуемых солдатами срочной службы. Русское авось и лень, а также не очень высокий уровень образования приводят к поломкам, порче комплексов связи или к их ограниченному использованию. Возможности комплекса «Акведук» использовались в Южной Осетии в августе 2008 года лишь процентов на 20. Привычку использовать аппаратуру в качестве Р-105 (обычный телефонный режим) пора искоренять. Как же обстоят дела в аналогичных структурах наших «вероятных противников».
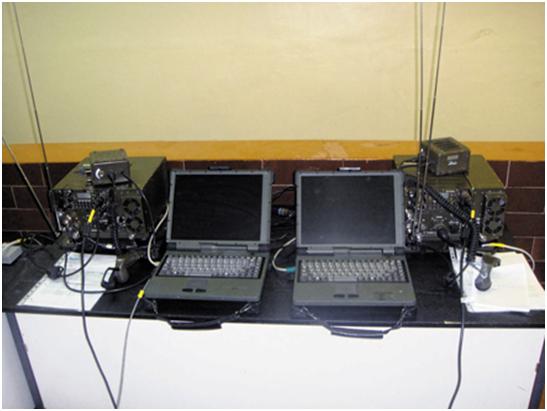
Рис. 2. Комплексы радиосвязи
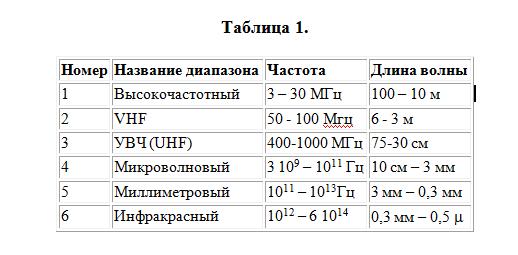
Применение электромагнитных волн для телекоммуникаций имеет уже столетнюю историю. Спектр используемых волн делится на ряд диапазонов, приведенных в таблице 1.
Далее следуют диапазоны видимого света, ультрафиолета, рентгеновских и гамма-лучей. Диапазоны часто, используемые различными каналами связи показаны на рис. 3
Рис. 3. Диапазоны частот различных телекоммуникационных каналов.
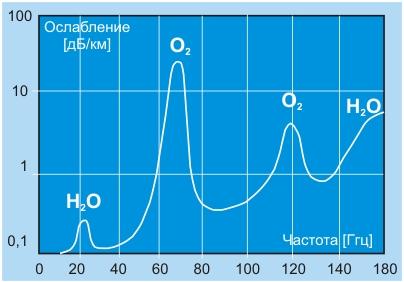
Если не используется направленная антенна и на пути нет препятствий, радиоволны распространяются по всем направлениям равномерно и сигнал падает пропорционально квадрату расстояния между передатчиком и приемником (удвоение расстояния приводит к потерям 6дБ). Радио каналы для целей передачи информации используют частотные диапазоны 902-928 МГц (расстояния до 10 км, пропускная способность до 64кбит/с), 2,4 ГГц и 12 ГГц (до 50 км, до 8 Мбит/с). Они используются там, где не существует кабельных или оптоволоконных каналов или их создание по каким-то причинам невозможно или слишком дорого. Более низкие частоты (например, 300 МГц) мало привлекательны из-за ограничений пропускной способности, а большие частоты (>30 ГГц) работоспособны для расстояний не более или порядка 5км из-за поглощения радиоволн в атмосфере. При использовании диапазонов 4, 5 и 6 следует иметь в виду, что любые препятствия на пути волн приведут к их практически полному поглощению. Для этих диапазонов заметное влияние оказывает и поглощение в атмосфере. Зависимость поглощения от длины волны радиоволн показана на рис. 4.
Рис. 4. Зависимость поглощающей способности земной атмосферы от длины волны
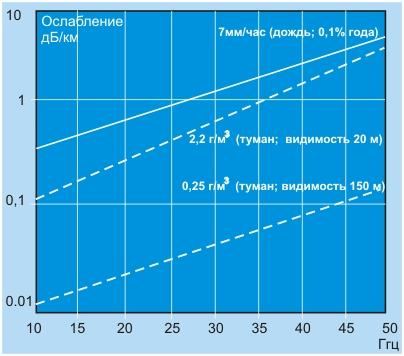
Из рисунка видно, что заметную роль в поглощении радиоволн играет вода. По этой причине сильный дождь, град или снег могут привести к прерыванию связи. Поглощение в атмосфере ограничивает использование частот более 30 ГГц. Атмосферные шумы, связанные в основном с грозовыми разрядами, доминируют при низких частотах вплоть до 2 МГц. Галактический шум, приходящий из-за пределов солнечной системы дает существенный вклад вплоть до 200 ГГц. Зависимость поглощения радиоволн в тумане и дожде от частоты показана на рис. 5.
Рис. 5. Зависимость поглощения радиоволн в тумане и дожде от частоты
Мощность передатчика обычно лежит в диапазоне 50 мВт - 2 Вт. Модемы, как правило, используют шумоподобный метод передачи SST (spread spectrum transmission). Для устройств на частоты 2.4 ГГц и выше, как правило, используются направленные антенны и необходима прямая видимость между приемником и передатчиком. Такие каналы чаще работают по схеме точка-точка, но возможна реализация и многоточечного соединения. На аппаратном уровне здесь могут использоваться радиорелейное оборудование радиомодемы или радио-бриджи. Схема этих устройств имеет много общего. Отличаются они лишь сетевым интерфейсом. Антенна служит как для приема, так и для передачи. Трансивер (приемопередатчик) может соединяться с антенной через специальные усилители. Между трансивером и модемом может включаться преобразователь частот. Модемы подключаются к локальной сети через последовательные интерфейсы типа RS-232 или v.35 (RS-249), для многих из них такие интерфейсы являются встроенными. Отечественное радиорелейное оборудование имеет в качестве выходного интерфейс типа G.703 и по этой причине нуждается в адаптере. Радио-бриджи имеют встроенный Ethernet-интерфейс. Длина кабеля от модема до трансивера лежит в пределах 30-70м, а соединительный кабель между модемом и ЭВМ может иметь длину 100-150м. Трансивер располагается обычно рядом с антенной.
Передача пакетов над водой
Для разработки многих приложений беспроводных сетей важно знать, насколько изменяются параметры распространения сигналов на открытом пространстве не над землей, а вдоль поверхности воды, особенно для излучения диапазона 2,4 ГГц, активно поглощаемого молекулами воды H2O. Это актуально при конструировании узконаправленных протяженных участков радиосвязи поперек крупных рек и озер, при создании систем сбора данных на водоемах, систем управления механизмами очистных и других гидросооружений и т. д.
Для определения качества связи над водой было проделано следующее. Один модуль был закреплен на деревянном пирсе в метре от поверхности воды. Второй – на корме катера, оснащенного системой глобального позиционирования GPS. Оба модуля были оснащены штыревыми полуволновыми антеннами S. В день проведения измерений было солнечно, и небольшой ветер формировал волну 20-30 см на поверхности озера.
Проведенные исследования показали, что при использовании антенн S-S обеспечивалась устойчивая связь вплоть до 225 м, далее, по мере увеличения расстояния, качество связи постепенно ухудшалось. Но даже на расстояниях 450-500 м фиксировались подтверждения принятого пакета, чего никогда не наблюдалось на суше.
Это позволяет сделать вывод о том, что над водной поверхностью дальность устойчивой связи увеличивается примерно в полтора раза, то есть сравнительно ровная поверхность воды служит дополнительным зеркалом, "усиливающим" сигнал в верхней полусфере.
Связь подводных лодок
Несколько неожиданное продолжение темы про подводных роботов: оказывается, мало кто знает, каким образом поддерживается дальняя и непрерывная связь с подводными лодками. А ведь такая связь – это очень важная штука, особенно если речь идёт обатомных подводных крейсерах. Понятно, что если лодка находится в надводном положении – проблем со связью нет: традиционные радиостанции и спутниковая связь обеспечивают связь в обоих направлениях и со многими кораблями. Но проблема в том, что атомные подводные лодки несут службу в глубинах океана, стараясь себя не обнаруживать (скрытность – основное преимущество субмарин). У радиоволн есть большие проблемы с распространением под водой. Как быть? Например, находясь на перископной глубине, лодка может поднять тот самый перископ и использовать для радиосвязи установленные на нём антенны. Проблема в том, что подобный перископ, увешанный антеннами, будет отлично выдавать лодку, так как может быть обнаружен самыми разными радарами противника. Интересно, что перископы современных лодок в надводной их части стараются делать малозаметными (по технологии, так сказать, “Стелс”). Более того, стараются максимально сократить время присутствия перископа над водой: например, перископ может подниматься, выполнять очень быстрое сканирование горизонта, передавать, используя специальный тип сигналов, короткие сообщения через спутник и тут же прятаться обратно, под воду. Надо заметить, что находясь на небольшой глубине, лодка может принимать радиоволны не высокой частоты (“короткие волны”, скажем) – они проникают на некоторую глубину под поверхность воды. При этом, в общем случае, радиоволны с более низкими частотами проникают несколько глубже под поверхность воды. Например, именно таким образом возможен приём сообщений с самолётов (есть специальные самолёты, обеспечивающие ретрансляцию сообщений подводным лодкам). Впрочем, даже если подводный крейсер только поднялся на перископную глубину, то можно считать, что он себя с большой долей вероятности обнаружил, хоть и не поднимал, собственно, перископа. Дело в том, что есть целый набор средств, позволяющих обнаруживать крупные подводные лодки на небольших глубинах: их видно со спутника, их спутный след, если лодка движется, может быть обнаружен специальными радарами и т.п. Так что без особенной необходимости лодка всплывать не станет.
Рис. 6. Иллюстрация: Edward L. Cooper
Для связи могут использоваться специальные буи, поднимаемые с лодки, находящейся в подводном положении. Такой буй, начинённый радиосистемами, привязанный к лодке и обменивающийся с ней информацией, может всплыть на поверхность, а может и оставаться на небольшой глубине, используя эффект с проникновением радиоволн, описанный абзацем выше. Но и буй – это полумера, не позволяющая реализовать непрерывную связь. Один из акустических вариантов состоит в размещении под водой ретранслирующих станций, имеющих надводные радиоантенны. Предположим, что такая станция преобразует радиосигналы в акустические колебания и транслирует их под водой, а лодка “принимает звук”, находясь на большой глубине. Акустическая подводная связь, в теории, работает на расстояниях, измеряемых десятками километров. При необходимости можно использовать дуплексный режим, то есть станция принимает сигналы от лодки и ретранслирует их по радио “в центр”. Однако весь океан такими станциями не застроишь, их можно разместить только вдоль традиционных районов патрулирования. (И тут есть ряд других проблем, о которых как-нибудь в другой раз.) Мы уже несколько вариантов рассмотрели, но так и осталось непонятным, каким образом условный “командный пункт” поддерживает связь с находящимися в автономном плавании на большой глубине подводными лодками.
Решение тут несколько неожиданное: таки используется радиосвязь. Но не простая, а на сверхнизких частотах, сверхдлинных волнах. Оказывается, что радиоволны длиной в тысячи километров (частота 70-90 Гц) проникают в самые глубокие океаны. То есть подводная лодка сможет принять сигнал на такой частоте, даже находясь на максимальной глубине. Правда, со столь низкочастотными радиоволнами есть целый ряд проблем.
Во-первых, их чрезвычайно сложно излучать (задача приёма – сильно проще). Действительно, ведь построить столь огромную антенну – нереально. Одним из способов трансляции сверхдлинных электромагнитных волн является использование самой земной коры в качестве излучателя. Правда, этот способ требует огромных затрат энергии и правильного выбора местоположения генерирующей установки, потому что существенную роль играют геологические особенности (электрическая проводимость, в частности) земных пород, расположенных под “генератором”. Зато радиоволны успешно распространяются по всему земному шару.
Во-вторых, низкая частота несущей волны означает, что чрезвычайно сложно создать модуляцию и выбрать систему кодирования, которые позволят сколь-нибудь быстро передавать заметное количество информации. Ведь 90 Гц – это даже и близко не 900 МГц, на которых еле-еле работает GPRS.
В-третьих, сигналы с подобными частотами приходится принимать на фоне сильных помех различной природы, а при этом эффективная мощность передатчика очень мала, несмотря на то, что “генерирующую установку” может питать целая электростанция. Впрочем, описанные проблемы не мешают использовать сверхдлинные волны для односторонней связи с подводными лодками в океане (а также и для исследования земной коры).
Так вот, при чём же здесь автономные подводные роботы? А при том, что именно сеть из таких роботов может обеспечивать оперативную и по более широкой полосе связь с подводными лодками. Роботы менее заметны, да и их обнаружение не даёт информации о местонахождении субмарины. При этом сеть роботов перемещается, сопровождая лодку, но так как это именно сеть, растянувшаяся на многие тысячи квадратных километров, секретность положения лодки – сохраняется.
Явления гидроакустики
Явление гидроакустики (ГА) уже достаточно давно широко используется в различных областях жизнедеятельности человека. С помощью гидроакустики производится поиск движущихся подводных объектов, осуществляется управление движением судов, прогнозирование стихийных бедствий, извержений вулкана, цунами и многое другое. Но, несмотря на востребованность данного явления, использовать его в большем масштабе было невозможно по многим причинам. Скорость распространения звуковой волны очень низка: например, скорость распространения звуковой волны в породах земной мантии 8 километров в секунду, в коре Земли – 3-4 километра в секунду, а в слоях осадочных пород, выстилающих дно океана всего 2 километра в секунду, то есть гораздо ниже скорости распространения звука в радиоканале. Ранее использовался некогерентный прием ДЧМ, так как эти системы более эффективны для гидроакустики, но они делали невозможным достижение более высокой скорости передачи данных. Развитие техники и технологии привело к появлению систем передачи данных узконаправленного действия с высокой скоростью передачи на дальние расстояния. Стало возможным не только передавать информацию на дальние расстояния, но и разворачивать целые сети для передачи информации под водой с обеспечением связи с внешними сетями. При использовании данных сетей связи, как и любых других, необходимо cоблюдение нескольких условий: передача информации между узлами должна осуществляться без потерь; необходимо обеспечить минимальную задержку при передаче данных; оптимальное использование ресурсов сети. Для гидроакустической сети связи очень важным параметром является также потребление энергии, так как иногда уменьшение энергетических затрат достигается путем более длительной передачи информации. Гидролокация – это обнаружение, определение местоположения и установление физической природы объектов в море с использованием отражения, переизлучения или собственного отражения акустических волн, распространяющихся в водной среде. Акустическая волна в данном случае – это полезный сигнал, с помощью которого передаются данные в гидроакустическом канале. Скорость передачи акустической волны на пять порядков ниже, чем скорость распространения радиоволн. При условии хорошего распространения звуковой волны дальность связи обеспечивается до 10 километров и более. Существуют приборы – лучеграфы, которые по значениям скорости звука на нескольких глубинах автоматически вычерчивают траекторию звуковых лучей, направленных под различными углами к горизонту. Важным фактором распространения звуковой волны является гидростатическое давление – глубина, на которой распространяется звук. Звуковой канал залегает в океане на глубине нескольких сотен метров. Возможны приповерхностные и поверхностные каналы, а также каналы в осадочных породах, застилающих дно. Существуют пассивные слои-фантомы морского дна – скопление морских организмов, обуславливающих появление звукорассеивающих полей. Гидролокационным наблюдением называется обнаружение объектов, определение их местоположения и измерение параметров движения гидроакустическими методами. Устройства, выполняющие эти функции – гидролокационные системы (ГЛС). В зависимости от того, как отражается гидроакустический полезный сигнал, различают следующие виды гидролокационного наблюдения. Гидролокационные системы наблюдения, основанные на отражении от объектов звуковых сигналов, излучаемых генератором гидролокационной системы. Отраженный гидроакустический сигнал несет информацию о координатах, параметрах движения объекта и о его физических особенностях. Такие гидролокационные системы называются активными. Они позволяют обнаруживать объекты, не являющиеся источниками активных излучений. Гидролокационные системы наблюдения, основанные на приеме сигналов собственного акустического излучения объектов. Это пассивные гидролокационные системы. К полезным сигналам пассивных систем можно отнести шумы механизмов и машин, гидродинамические шумы, излучения генераторов гидролокационных систем. Гидролокационные системы наблюдения, основанные на ретрансляции – переизлучении сигналов генераторов активных гидролокационных систем специальными ретрансляторами, что широко используется в навигации. Схема гидролокатора такова: мощный электрический генератор создает звуковые или ультразвуковые импульсы-посылки. После излучения импульса излучатель переключается на режим приема колебаний и с этого момента начинает принимать эхо, отраженное любыми подводными препятствиями. Звуковая мощность гидролокатора очень велика. Шумопеленгатор (пассивный гидролокатор) для надводного корабля – это подводные “уши”, а для подводной лодки и “глаза”, так как на больших глубинах гидроакустическое ухо слышит дальше, чем видит телевизионный подводный глаз. В качестве приемников шумопеленгаторов применяют пъезоэлектрические или магнитострикционные преобразователи. В первом случае под воздействием звукового давления получаются электрические заряды, которые подаются на вход усилителя, а он в свою очередь увеличивает электрическое напряжение до необходимого значения. А в магнитострикционном приемнике происходит преобразование звуковой энергии в энергию электро-магнитного поля. Чтобы получить более сильные сигналы используют не один приемник, а группы подводных приемников. Данные от гидролокационного устройства поступают на донные станции, датчики гидроакустической сети связи. Сеть состоит из большого числа датчиков, которые могут быть неподвижными, или медленно передвигающихся. Суммарная информация гидроакустической сети состоит из океанических параметров: например солености воды, температуры, подводных потоков. На поверхности располагаются станции, которые служат как шлюзы, обеспечивающие радиосвязь с береговыми станциями. Пользователями таких сетей могут быть метеорологические станции, военные центры, добывающая и промысловая промышленность и другие. Осуществляется и обратная задача, например субмарина может обратиться к внешним системам и осуществить передачу сигнала подводной сети. Подводные лодки получают современное гидроакустическое оборудование обнаружения и связи, приборы для обнаружения работы гидролокационных станций противника, приборы для прогнозирования погоды. Также для военной и добывающей промышленности используется гидроакустический канал для приведения в действие различных подрывных устройств. Особенностью таких сетей является низкая пропускная способность и высокое время ожидания из-за медленного распространения звука и высокого уровня шумов.
Подводные акустические сети
Подводные акустические сети состоят из автономных донных станций и поверхностных, которые служат как шлюзы и обеспечивают радиосвязь с береговыми станциями. Примечательной стороной таких сетей является низкая пропускная способность акустических каналов передачи, высокое время ожидания, следующее из медленного распространения звука, и высокие уровни шумов. Конечная цель при разработке подводных акустических сетей состоит в том, чтобы обеспечить самоконфигурирование узлов, которые автоматически адаптировались бы к среде. В последние два десятилетия, акустическая технология связи под водой испытала существенный прогресс. Системы связи с повышенной скоростью передачи и надежностью теперь доступны для организации соединения в реальном масштабе времени между подводными узлами. Настоящие разработки направлены на объединение соединений точка-точка в единую сеть, чтобы удовлетворить запрос на системы, способные собирать и передавать данные с больших площадей: типа совокупности данных окружающей среды, контроля загрязнения и военного наблюдения.
Гидроакустическая связь
В отличие от цифровой связи через радио каналы, где данные передаются посредством электромагнитных волн, в подводных каналах прежде всего используются акустические волны. Скорость распространения акустических волн в ГА каналах на пять порядков меньше, чем скорость распространения радиоволн. Низкая скорость распространения соответственно увеличивает время ожидания пакета в сети. Если высоко время ожидания пакета, то при разработке сетевых протоколов для ГА следует учитывать, что скорость передачи в сети будет значительно меньше, нежели в радиоканале. Возможная пропускная способность ГА канала зависит от частоты передачи. При этом для акустических сигналов наблюдается явление многолучевости распространения, что может приводить к значительным искажениям исходного сообщения. Для борьбы с многолучевостью и Доплеровским эффектом требуется значительное снижение скорости передачи данных и применение специальных методов обработки сигналов.
Гидроакустические сети
Два типа задач приветствовали развитие подводных гидроакустических сетей. Первая задача сбора данных о состоянии окружающей среды, а другая – наблюдение за состоянием подводной обстановки. Как правило, сеть состоит из нескольких типов датчиков, некоторые из которых установлены стационарно, а другие на свободно перемещающихся транспортных средствах этот тип сети называется автономной Океанической Сетью, где суммарная информация состоит из набора океанографических параметров, например: температуры, солености, подводных потоков. Сеть состоит из большого числа датчиков, как правило, неподвижных или медленно передвигающихся. Такая сеть может быть быстро развернута. Задача такой сети охватить мелкую водную область.
Характеристики гидроакустической сети
Список литературы
Олифер В.Г., Олифер Н.А. Компьютерные сети. Принципы, технологии, протоколы. – Санкт-Петербург: Питер, 2001. – 672с.: ил.
Новиков С.Н. Методы маршрутизации на цифровых широкополосных сетях связи: Ч.1 / Учебное пособие. – Новосибирск: 2000. – 84с.: ил.
«ВикипедиЯ» свободная энциклопедия.
«Братишка» журнал подразделений специального назначения» От 6.01.2011.
Семенов Ю.А. Беспроводные (радио) каналы и сети |