Аннотация
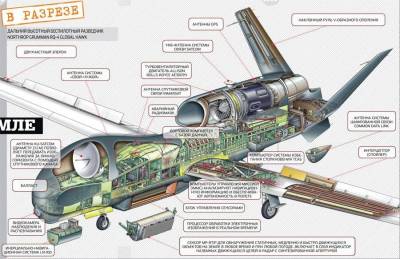 Рисунок1. БПЛА
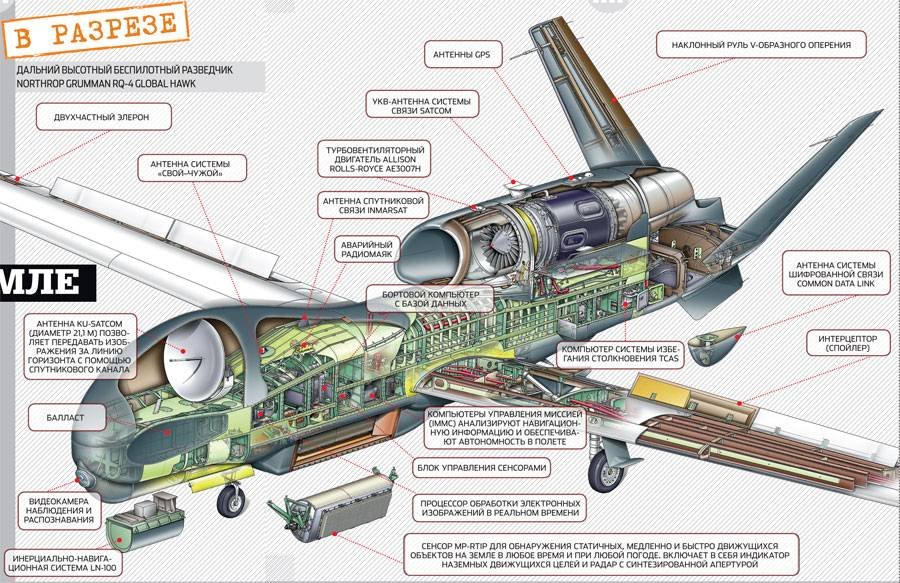
Рисунок1. БПЛА В данной статье дано описание устройства сетей на борту беспилотных летательных аппаратов (БПЛА) (рис. 1). Предоставлена классификация БПЛА, приведена техническая реализация построения сетей, а также на конкретном примере показан процесс создания такого аппарата.
Оглавление
Список определений, обозначений и сокращений
Введение
Классификация БПЛА
Область возможных применений
Элементная база БПЛА
Стандарты передачи данных
Применение БПЛА
Мультиагентный подход и трехуровневая система управления БПЛА
БПЛА-агент для автономной группы
Алгоритм групповой работы сети БПЛА
Программирование бортового микрокомпьютера БПЛА
Заключение
Список литературы
Список определений, обозначений и сокращений
БПЛА – беспилотный летательный аппарат.
WiFi – (Wireless Fidelity - «беспроводная точность»), торговая марка Wi-Fi Alliance для беспроводных сетей на базе стандарта IEEE 802.11.
ВМФ – военно-морской флот.
GPS – (Global Positioning System) — система глобального позиционирования, спутниковая система навигации, обеспечивающая измерение расстояния, времени и определяющая местоположениe во всемирной системе координат WGS 84.
ИТ – информационные технологии.
UAV – БПЛА (летательный аппарат без экипажа на борту).
МАС – многоагентная система - система, образованная несколькими взаимодействующими интеллектуальными агентами
Введение
Существует широкий спектр работ, участие человека в которых нежелательно. В наше время благодаря экономическому и технологическому прогрессу существуют новейшие электронные системы, роботизированные грузовые платформы, микроскопические шпионы, беспилотные военные транспортные средства. Все эти автоматические устройства заменяют человека в боевых ситуациях для сохранения жизни или для работы в условиях, не совместимых с возможностями человека, в целях разведки, разминирования и боевых действий [1].
Для выполнения специфических и весьма важных для общества функций разрабатываются различные беспилотные летательные аппараты (БПЛА). В настоящее время существуют как беспилотные автономные, так и дистанционно-пилотируемые летательные аппараты. По функционированию они делятся на многоцелевые, экспериментальные, оперативные, разведчики, планеры для боеприпасов, ударные и БПЛА с модульной нагрузкой [1].
Бурное развитие беспилотных и роботизированных комплексов стало возможным благодаря ряду технических решений, связанных с развитием систем автоматизированного управления, навигации, ростом производительности и миниатюризацией микропроцессорной техники, с использованием перспективных телекоммуникационных средств, а также с влиянием политических установок на минимизацию потерь личного состава и техники при ведении вооруженных конфликтов [2].
Классификация БПЛА
Различают беспилотные летательные аппараты [3]:
• беспилотные неуправляемые;
• беспилотные автоматические;
• беспилотные дистанционно-пилотируемые летательные аппараты (ДПЛА).
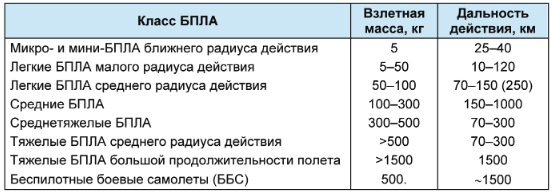
БПЛА принято делить по таким взаимосвязанным параметрам, как масса, время, дальность и высота полёта. Выделяют следующие классы аппаратов (табл. 1):
• «микро» (условное название) — массой до 10 килограммов, временем полёта около 1 часа и высотой до 1 километра;
• «мини» — массой до 50 килограммов, временем полёта несколько часов и высотой до 3—5 километров;
• средние («миди») — до 1 000 килограммов, временем 10—12 часов и высотой до 9—10 километров;
• тяжёлые — с высотами полёта до 20 километров и временем полёта 24 часа и более.
Таблица 1. Классификация БПЛА 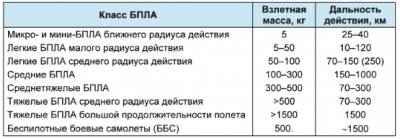
Область возможного применения беспилотных аппаратов
Беспилотный малоразмерный и малозаметный аппарат способен решать большой объем задач в интересах ВМФ:
• ведение радио-, радиотехнической, телевизионной, фотографической, инфракрасной и других видов технических разведок;
• наблюдение за назначенным районом, обнаружение, идентификация, а также уничтожение (при наличии на борту вооружения) целей;
• проведение мероприятий радиоэлектронной борьбы (в том числе подавление радиоэлектронных средств противника);
• целеуказание для корабельных или наземных систем вооружения (в том числе подсветка целей лучом лазера для управления артиллерийскими снарядами и ракетами с лазерной системой наведения);
• поиск противолодочных мин;
• доставка экстренных грузов специального назначения;
• бомбометание с малых высот, пуски ракет «воздух – земля» по труднодоступным целям (например, пещерам в горах) и т. д.;
• работа в качестве ретранслятора для систем связи ВМФ и др.
Элементная база БПЛА
Задачи, стоящие перед разработчиками современных БЛА военного и гражданского применений выдвигаю жесткие требования к организации, составу, а также характеристикам СУ. В рамках представленного материала будут рассмотрены элементы системы навигации ЛА – подсистемы СУ, решающей задачу оценивания вектора состояния ЛА в полете. Рассмотрим элементный состав типовой системы навигации для каждого из рассматриваемых классов аппаратов. Отметим, что под типовой будем понимать некоторое обобщенное представление системы навигации современных аппаратов.
Типовая система управления мини- и микро-БЛА
Состав типовой системы навигации БЛА можно описать следующим образом:
• GPS-приемник,
• бесплатформенная инерциальная навигационная система (или набор ДУСов и акселерометров),
• датчик абсолютного давления,
• дифференциальный датчик давления (измеритель скорости движения БЛА).
GPS-приемник служит для определения координат аппарата, горизонтальной скорости и угла поворота траектории БЛА. Одной из особенностей спутниковых систем навигации является определение высоты произвольной точки со значительной погрешностью. Поэтому, в качестве высотомеров применяются датчики абсолютного давления.
Контур стабилизации скорости движения используется почти на каждом БЛА, что требует включение в состав аппаратуры СУ некоторого датчика скорости ЛА. Стабилизация углового положения БЛА требует включения в состав бортовой аппаратуры ДУСов, информация с которых часто обрабатывается совместно с данными с GPS-приемника. С одной стороны, это позволяет компенсировать температурные дрейфы ДУСов, с другой – обеспечить управляемое движение аппарата в случае пропадания сигнала с приемника, что может быть вызвано естественными причинами (уход из зоны видимости спутников, неполадка аппаратуры) и искусственным подавлением сигнала с GPS.
При рассмотрении микро-БЛА, отмечают, что навигация с использованием GPS была бы почти идеальным решением, но существующие системы слишком тяжелы и энергозатратны для применения на микро-БЛА. Инерциальная навигация для микро-БЛА ждет разработки микрогироскопов с низким дрейфом и соответствующих акселерометров. Применение в городских условиях с сужающимися коридорами улиц сложной геометрии, наличием препятствий, в том числе движущихся, составляют неординарную внешнюю среду для мини- /микро-БЛА. Оперативное участие оператора для стабилизации аппарата и управления рассматривается для ранних проектов, но условия и ограничения полета делает это решение неэффективным для большого количества приложений. Например, необходимый маневр аппарата в ответ на порыв воздуха может быть отработан человеком-оператором, однако оперативное участие оператора в управлении может быть реализовано только для простых сценариев применения. Ясно, что необходим значительный прогресс в областях миниатюрных систем навигации, систем наведения и управления [4].
Малый масштаб аппаратов ставит огромные технические проблемы, но это представляет и главные преимущества, не только в терминах новых заданий, но и в терминах потенциально короткого изготовления и тестирования (во временном масштабе). Так что вариант достаточно быстрого развития миниатюрных БЛА военного назначения в не слишком отдаленном будущем представляется вполне реалистичным.
Таким образом, на сегодняшний день основной тенденцией в разработке СУ, в частности систем навигации БЛА военного и гражданского применения является миниатюризация. Однако условие по сохранению основных функций требует искать новые технологии создания миниатюрных, высоко функциональных устройств и обязательного сохранения в составе бортовой аппаратуры основных информационных датчиков.
Типовая СУ управляемой авиационной бомбы и артиллерийского снаряда
Если вес мини- и микро-БЛА составляет несколько килограммов и сотни граммов, соответственно, а размеры микро-БЛА не превышают 15 см в любом измерении, то вес авиационные бомб и артиллерийских снарядов исчисляется сотнями килограммов. В этой связи, говоря про требование к компактности и малой массе СУ УАБ, следует чувствовать различие с БЛА. Однако на сегодня, многие стандартные датчики системы навигации (GPS-приемник, ДУСы, акселерометры) удовлетворяют требованиям как разработчиков мини-БЛА, так и управляемых авиационных бомб.
Артиллерийские снаряды и авиационные бомбы не случайно объединены в один раздел. История их развития имеет много общего. Первоначально это были неуправляемые аппараты, эффективность применения которых увеличивалась наращиванием БЧ или массивными ударами авиации и артиллерии. Однако совершенствование систем объектовой ПВО противника значительно снизило эффективность снарядов и авиабомб и живучесть носителей.
Таким образом, было принято решение об оснащении снарядов аппаратурой СУ.
Состав типовой системы навигации УАБ и артиллерийских снарядов имеет следующий вид:
• приемник GPS/ГЛОНАСС и аппаратура обработки и фильтрации сигнала,
• бесплатформенная инерциальная навигационная система.
Следует отметить значительное увеличение требований к частоте и качеству данных, поступающих с GPS-приемника. Применение спутниковой навигационной системы в качестве основы навигационного алгоритма осложнено по причинам:
• неустойчивости функционирования при внешних воздействующих факторах, характерных для рассматриваемого класса объектов,
• длительного времени получения первой достоверной информации (не менее 8-14 с),
• низкой помехозащищенности,
• низкого быстродействия (не более 10 Гц),
• принципиального отсутствия возможности выработки параметров ориентации в габаритах рассматриваемого класса объектов [2].
Серьезным является вопрос доверия к данным со спутниковой навигационной системы. Франция отказалась от варианта коррекции по данным NAVSTAR, так как не обладает контролем над функционированием спутников. В РФ до полного развертывания группировки ГЛОНАСС вариант даже комплексирования БИНС с СНС на изделиях военного назначения неоднозначен.
Для борьбы с указанными недостатками на рассматриваемых артиллерийских снарядах используется несколько GPS-приемников и антиподавляющая GPS антенна. Параллельно с УАБ вводятся алгоритмы глубокого интегрирования с БИНС и другими измерителями текущего движения аппарата.
Инерциальная навигационная система может быть выбрана в качестве основной, в том числе выполняющей алгоритмы законов управления, при однозначном решении задачи начальной выставки и временной коррекции дрейфа автономной БИНС при продолжительном полете (от 2 минут и более). В качестве источника данных начальной выставки для БИНС может выступать система ближайшей радионавигации и спутниковая навигационная система, в отдельных случаях магнитометрическая система. В качестве источника временной коррекции дрейфа автономной БИНС могут быть использованы спутниковая навигационная система, магнитометрические данные, а также, принципиально, данные от других бортовых систем, вырабатывающих или определяемых отдельные компоненты движения объекта. Поэтому применение синергического подхода к созданию интеллектуальной интегрированной системы навигации и управления на базе указанных выше систем позволит реализовать перспективные требования к высокоточному оружию в разрезе новых концепций ведения боевых действий [3].
В свою очередь система навигации приемлемых размеров, цены и массы и функционирующая в условиях действия помех, характерных для выстрела снаряда (перегрузки от 10000 g до 20000 g) или пуска ракеты, бомбы может быть создана только с использованием датчиков на базе MEMS-технологий, что обусловливает несомненную важность их разработки.
Стандарты передачи данных
Документ AEDP-8 описывает требования к форматам изображений и каналам передачи данных, а также связанные с MI метаданные, сопровождающие любой информационный поток с борта БПЛА. Однако собственно формат передачи потоков данных с борта БПЛА регламентирован в стандарте STANAG 7023 и руководстве AEDP-9 [5]. Без этих нормативных документов невозможно строго оценить фактические требования к пропускной способности каналов связи с БПЛА, поскольку передача собственно изображений должна сопровождаться обязательной служебной информацией, отвлекающей на себя часть транспортного ресурса радиолинии. Стандарт STANAG 7023определяет два класса данных: сенсорные и вспомогательные. Сенсорные данные поступают от сенсоров, формирующих видеоизображения (радары с синтезированной апертурой, инфракрасные и телевизионные фотокамеры и т.д.) [8].
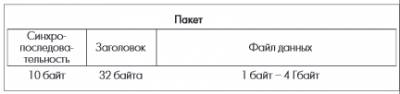
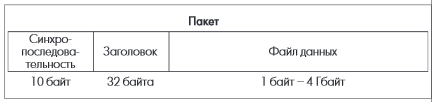
Рисунок 2. Структура пакета данных Стандарт предусматривает передачу цифровой информации максимум с 64 бортовых сенсоров, формирующих изображения. Эти видеопотоки сопровождаются вспомогательными данными, в которых содержится информация о формате видеоданных, алгоритмах их обработки и т.п. Кроме того, могут передаваться данные, формируемые другими бортовыми датчиками – навигационным оборудованием, бортовыми системами управления, включая систему управления видеосенсорами, навигационно-пилотажный комплекс и т.д. Всего на борту может быть 256 различных источников данных. Все данные (сенсорные и вспомогательные) передаются в виде отдельных файлов. Каждый файл имеет свой уникальный заголовок, содержащий адрес источника (1 байт, 256 различных адресов) и адрес получателя (4 байта). Эти 5 байт, по сути, определяют 240 различных типов файлов. В случае сенсорных данных формат файлов определяется в связанных с ними файлах вспомогательных данных. Все данные передаются по радиолинии пакетами (рис.2). Пакет включает синхронизирующую последовательность (10 байт), заголовок (32 байта) и собственно файл данных (до 4 Гбайт). Пакет защищается контрольной суммой CRC – обязательно для заголовка и опционально для файла данных. Заголовок определяет длину файла данных, адрес источника и адрес получателя, а также ряд дополнительных параметров, таких как наличие CRC файла данных. Адрес источника однозначно указывает на тип данных – данные о миссии, данные о цели, телеметрия платформы, параметры сенсоров, данные от сенсоров и т.п. Если приемник не смог получить или правильно декодировать пакет, он может быть отправлен повторно, с тем же самым заголовком.
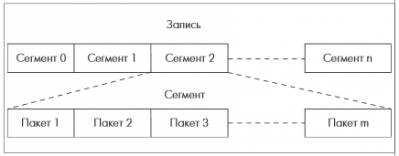 Рисунок 3. Логическая структура канала
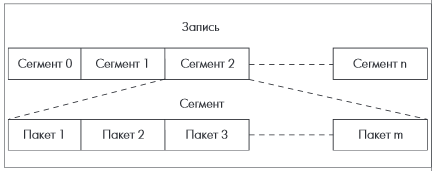
Рисунок 3. Логическая структура канала Пакеты объединяются в сегменты (рис.3), а те, в свою очередь, – в так называемые записи (Records). В отдельных сегментах пакеты следуют непосредственно друг за другом, без каких-либо разделителей. Сами сегменты, помимо пакетов данных, могут содержать преамбулы, постамбулы и маркеры конца сегментов. Отдельный сегмент, как правило, связан с активностью отдельных групп сенсоров по ходу миссии. Обычно на протяжении сегмента активен как минимум один сенсор. Последовательность сегментов образует запись. В терминологии стандарта STANAG 7023 запись – это последовательность сегментов по ходу выполнения миссии. В принципе, стандарт допускает наличие нескольких записей (т.е. несколько независимых потоков данных), но в существующей на сегодня четвертой редакции описывается только работа с одной записью.
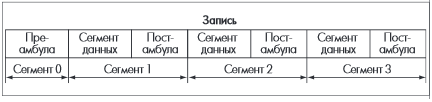
 Рисунок 4. Структура записи без маркеров конца сегмента и записи.
Рисунок 4. Структура записи без маркеров конца сегмента и записи. Структура записи включает преамбулу и набор сегментов, разделенных оконечными маркерами (постамбулами) (рис.4). Запись завершается маркером конца записи. Начальный, нулевой сегмент записи – всегда преамбула. Преамбула – это набор вспомогательный данных, предшествующих первому информационному сегменту и позволяющих наземной станции обработать последующий поток информационных пакетов. Например, в преамбуле может содержаться информация о цели, деталях миссии, режиме работы сенсоров (тип, формат, способ кодирования и т.п.). Как правило, преамбула предшествует началу выполнения задания (миссии). Постамбула – это набор вспомогательных файлов после сегмента данных. Он может содержать повторение преамбулы, индексированные файлы с данными – интервалы работы сенсоров, таблицы событий, навигационная информация и т.п. Данные постамбулы должны быть достаточными для определения положения и типа целей, режимов работы сенсоров и т.п. в связке с предшествующим потоком видеоданных (сенсорных данных). Наличие постамбулы в сегменте не обязательно.
Применение БПЛА
В настоящее время миниатюризация электронных компонент и технологичность их изготовления позволяет применять небольшие и доступные БПЛА для выполнения задач исследования территории. Несмотря на небольшие размеры "игрушечные" самолеты сейчас способны развивать скорость свыше четырехсот км/ч, при установке на них небольшого реактивного двигателя. Для примера рассмотрим "Мультиагентную систему для БПЛА", используется легкий планер PAPRIKA и небольшой квадрокоптер (вертолет) [6].
Технические характеристики планера:
• размах крыльев 2 м, вес 2 кг
• полезная нагрузка 500 г
• скорость 40-60 км/ч
• дальность 200 км
и квадрокоптера:
• длина лучей 450 мм
• полезная нагрузка до 1,2 кг
• скорость до 20 км/ч
• дальность до 1 км
Комплект бортового оборудования для управления и связи состоит из:
• исполнительных механизмов, которые в зависимости от источника способны работать, как с цифровым, так и с аналоговым управляющим сигналом;
• комплекта мотоустановки, в который входит: аккумулятор, контроллер оборотов и безколллекторный электрический двигатель;
• автопилота
• комплекта приемника радиосигнала;
• для навигации используется стандартный набор инерциальной системы и современный ГЛОНАСС/GPS приемник;
• передача телеметрии построена на модемах XBee 2.4 GHz;
• различное дополнительное оборудование;
• смартфон Intel с ОС Аndroid построен на основе процессора Intel Atom X86.
За счёт небольшого веса БПЛА взлёт осуществляется с рук человека. Посадка – либо за счёт встроенного парашюта, либо за счёт "перехвата" на ручное управление. Наличие "на борту" полнофункционального микрокомпьютера позволяет использовать БПЛА не просто в режиме "удаленной видеокамеры", которая передает видеопотоки в зоне прямой радиосвязи, а как интеллектуального мобильного агента с функциями автопилота. Такой агент способен существенно переработать исходную информацию, подготовить ее для обработки и самостоятельно автономно передать ее суперкомпьютеру по разным каналам связи – в том числе и через Интернет. Реальное ускорение в обработке данных позволит перевести в практическую плоскость и организацию автоматической обратной связи от суперкомпьютера к БПЛА с указанием возможных корректировок планов полета и наблюдений. Бортовые микрокомпьютеры со связью позволяют организовать и автономное взаимодействие внутри группы БПЛА для возможности перераспределения или уточнения заданий, обмена данными и т. п.
В мире ИТ уже во многих областях побеждает схема, в которой нет четкого выделения трех изолированных стадий: подготовка данных, счет, анализ результатов. Этому способствовало всеобщее проникновение персональных компьютеров, смартфонов, мобильных телефонов, которые кардинально изменили представления о месте ЭВМ в обычной жизни. Компьютеры уже интегрированы во многие сферы человеческой деятельности, разработчики встраивают миниатюрные вычислительные устройства и специализированные программы во внутрь многих процессов. В массовом сознании о роли ЭВМ в практической жизни уже произошел сдвиг от супервычислителя к мобильности, понимаемой в очень широком смысле.
Модель вычисления можно представить следующим образом: мобильные устройства, которые обладают различными датчиками и сенсорами (например, видео- или фото- камерой, gps, датчиками температуры и давления и т.п.) и способны "общаться" друг с другом, являются сборщиками информации, они передают информацию на суперкомпьютер где и происходят конечные вычисления. Мобильные устройства, собирая информацию, одновременно могут фильтровать её, т.е. отмечать особенности и разделять данные различные по тематике [3].
Эта модель реализуется на примере проекта "Мультиагентная система для группы лёгких беспилотных летательных аппаратов". Трудно переоценить актуальность такой задачи для России с её огромной территорией, сельскохозяйственными угодьями, лесами, множеством газо- и нефтепроводов, ЛЭП и "пожарами". При создании такой системы как раз и проявляются все обсуждавшийся выше проблемы. Многие из задач – разведка полезных ископаемых, поиск людей, выяснение причин техногенных катастроф, плановое патрулирование территорий и т.п. требуют для получения практических результатов применения супервычислений с огромным количеством исходных данных, которые должны поступать на суперкомпьютер в режиме реального времени. Если используются традиционные БПЛА с оператором и приемом/передачей данных по радиоканалу, то реальные автоматизированные системы "захлебываются" от потоков данных, которые надо еще сохранять и передавать компьютеру для обработки. Об обратном потоке управления БПЛА обычно даже речь и не идет, так как результаты не удается получить в реальном времени.
Основная идея проекта заключается в создании сети БПЛА. Такая сеть состоит из группы БПЛА-агентов, которые способны "общаться" между собой и обмениваться данными с базовой станцией или с сетью базовых станций. Базовая станция или сеть таких станций "собирают" и фильтруют информацию и отправляют конечный результат суперкомпьютеру.
Мультиагентный подход и трёхуровневая система управления БПЛА
Комплекс БПЛА, как правило, состоит из одного БПЛА и базовой станции под управлением человека. Человек с базовой станцией определяет задачу для БПЛА, последний, в свою очередь выполняет её и передаёт информацию на базовую станцию, при этом человек способен отслеживать ход выполнения задания. Иногда используют несколько комплексов, при этом каждый БПЛА привязан к своей базовой станции. Обмен информацией между комплексами происходит только на земле, между базовыми станциями [6]. Такую работу комплекса можно представить, как двухуровневую систему управления. Верхний уровень управления осуществляется базовой станцией. Здесь определяется глобальная задача для БПЛА, задаётся высота полёта, скорость полёта, маршрут, тачки сбора информации и т.д. Нижний уровень управления осуществляется автопилотом БПЛА, который действует по записанной на него программе с базовой станцией. Для выполнения задачи автопилот управляет исполнительными механизмами, собирает информацию с датчиков и отправляет данные на базовую станцию.
Описанная выше система управления комплексом и принцип применения нескольких комплексов БПЛА для группового выполнения задачи характеризуются отсутствием автономной постановки новых задач, позволяющей группе оперативно принимать эффективные решения по изменению сценария выполнения поставленной задачи. Типичными примерами событий, вызывающих необходимость в постановке новых задач, являются: появление нового выгодной информации, для более эффективного выполнения задачи; выход из строя части имеющихся ресурсов; а также изменение критериев принятия решений. Чем выше неопределенность, чем более распределенный характер имеют процессы принятия решения и чем чаще случаются незапланированные события, тем ниже эффективность существующих систем, не способных самостоятельно принимать решения и автоматически перестраиваться под изменения в среде. Кроме того, любая модификация схем принятия решений в традиционных системах представляет собой весьма сложный и трудоемкий процесс и требует высокой квалификации исполнителей, что делает разработку и эксплуатацию рассматриваемых систем крайне дорогостоящими.
Для решения подобных проблем применяются мультиагентные технологии. В основе этих технологий лежит понятие "агента", программного объекта, способного воспринимать ситуацию, принимать решения и взаимодействовать с себе подобными. Характерными особенностями интеллектуальных агентов являются:
• коллегиальность, т.е. способность к коллективному целенаправленному поведению в интересах решения общей задачи;
• автономность, т. е. способность самостоятельно решать локальные задачи;
• активность, т. е. способность к активным действиям ради достижения общих и локальных целей;
• информационная и двигательная мобильность, т. е. способность активно перемещаться и целенаправленно искать и находить информацию, энергию и объекты, необходимые для кооперативного решения общей задачи;
• адаптивность, т. е. способность автоматически приспосабливаться к неопределенным условиям в динамической среде.
Эти возможности кардинально отличают мультиагентные системы (МАС) от существующих "жестко" организованных систем управления группы автономных БПЛА.
Желательно выполнение двух основных требований для разработки мультиагентной системы для группы БПЛА. Во-первых, на каждой модели должен быть небольшой, но мощный микрокомпьютер для работы, автономного изменения задания для автопилота, и общения в мультиагентной системе. Во-вторых, необходимо организовать устойчивую связь между агентами группы.
Отметим полезные свойства, которыми обладает группа взаимодействующих моделей по сравнению с использованием одного БПЛА:
• коллективный облет вырабатывает большую картину мира;
• взаимодействие между собой помогает оптимизировать маршрут полета, основываясь на уже имеющихся данных с другого БПЛА;
• большее множество стратегий;
• возможность создания объемной картины мира;
• более эффективное решение задач (экология, метеорология, оптимизация полёта группы);
• больше гарантий выполнения задачи;
• выигрыш во времени (главное условие для задач поиска потерявшихся людей);
• возможность одновременного обследования территории;
• возможность корректировки плана и выбора оптимального маршрута, основываясь на имеющихся данных соседнего UAV;
• возможность постановке разных задач для разных участников группы UAV.
Для применения мультиагентного подхода к группе БПЛА в двухуровневую схему управления комплексом БПЛА мы добавляем промежуточный средний уровень, который осуществляется за счёт дополнительного микрокомпьютера установленного в БПЛА [7].
$IMAGE8
Рис. 5. Три уровня управления БПЛА-агента Таким образом, мы получаем новую трёхуровневую систему управления БПЛА-агента (рис. 5), в которой, на верхнем уровне происходит формирование глобального задания уже для группы БПЛА, начальные условия, корректировка или изменения глобальной задачи, а также приём и обработка полученной от группы информации. На верхнем уровне находится персональный компьютер, к которому подсоединены различные модули для связи (модемы, радиоприемники и др.). Средний уровень управление осуществляется за счёт внедрения в БПЛА микрокомпьютера, который способен обмениваться информацией с другими членами группы и базовой станцией. На основе этой информации микрокомпьютер может изменить свою начальную задачу для ускорения достижения цели глобальной задачи, если это потребуется. Таким образом, мы получаем группу БПЛА-агентов, которая способна адаптироваться к изменениям происходящим во внешней среде. На нижнем уровне находятся управление исполнительными механизмами, датчиками и дополнительным оборудованием.
БПЛА-агент для автономной группы
Выше описана система управления группой БПЛА. Основное отличие группы от привычного комплекса БПЛА – это автономное общение БПЛА-агентов между собой. Для того, чтобы реализовать мультиагентную систему для управления группой БПЛА, необходимо пересмотреть аппаратное оснащение одиночного БПЛА.
Рассмотрим трехуровневую систему с точки зрения аппаратной реализации.
На верхнем уровне управления нами применяется компьютер – базовая станция (ноутбук, нетбук или стационарный ПК), оснащённый различными средствами связи (радиомодемом, Wi-Fi модемом, Интернет модемом) (рис. 6). Основными задачами базовой станции являются:
• определение глобальной миссии группы БПЛА-агентов (параметры территории исследования, задание способов исследования, высота полёта и т.д.);
• разбиение глобальной задачи на части и формирование начальной индивидуальной задачи для каждого БПЛА-агента группы в зависимости от количества БПЛА-агентов и поставленной перед группой задачей;
• обмен информацией с БПЛА-агентами, находящимися в зоне связи;
• сбор и обработка информации от БПЛА-агентов группы;
• формирование новой глобальной миссии для группы в зависимости от поступающей на базовую станцию новой информации.
 Рис. 6. Верхний уровень управления БПЛА-агента
Рис. 6. Верхний уровень управления БПЛА-агента На среднем уровне управления БПЛА-агента находится бортовой микрокомпьютер – головное устройство системы управления БПЛА. Его основная цель – выполнить поставленную ему задачу с наименьшими затратами по времени и ресурсам [7]. Для этого он выполняет пять основных функций:
• генерация обновлений к программе полета для автопилота;
• обработка данных навигационного оборудования и телеметрии;
• работа с дополнительным оборудованием;
• общение с микрокомпьютерами других БПЛА (если работа ведется в группе);
• отправка данных на базовую станцию и получение от нее новых заданий.
С базовой станции микрокомпьютер получает общие задачи (начальное состояние, конечные точки, задача для группы и т.п.). При групповом полете общая задача разбивается на частные для каждого БПЛА. В процессе выполнения задачи микрокомпьютер осуществляет общение с другими членами группы, находящимися в радиусе действия радиосвязи. Взаимодействие в группе позволяет группе БПЛА эффективнее выполнить общую задачу, а также избежать столкновений.
На основе полученных данных от базовой станции, с навигационного оборудования и при общении с другими БПЛА, микрокомпьютер может сгенерировать новую программу для автопилота, если старая не поддерживает нужных требований для выполнения общей задачи.
При пролете БПЛА в зоне связи с базовой станцией микрокомпьютер отправляет новые накопленные им данные и получает новые задания. При этом накопление данных происходит не только за счет собственных сенсоров и датчиков, но и при связи с другими БПЛА. Как говорилось выше, в микрокомпьютер закладывается отдельная для него задача и общая задача группы. В процессе общения микрокомпьютер накапливает информацию о выполнении общей задачи. Данные о выполнении своей частной задачи он получает сам, используя бортовые датчики.
Связь с базовой станцией осуществляется за счет отдельного радиоканала или через GPRS по GSM модему. GSM модем легко интегрируется с микрокомпьютером, но для передачи данных пакеты необходимо сжимать.
Связь между микрокомпьютерами разных БПЛА осуществляется за счет встроенного радиоприемника с частотой 2,4 GHz и протоколом общения 802.11 n (Wi-Fi), в котором применяется технология, связывающая два ближайших канала в один. Таким образом, микрокомпьютеры в БПЛА смогут одновременно принимать и отправлять информацию друг другу. Связь с базовой станцией осуществляется за счет отдельного радиоканала или через GPRS по GSM модему [7].
За счёт небольшого веса БПЛА взлёт осуществляется с рук человека или с катапульты. Посадка – либо за счёт встроенного парашюта, либо за счёт "перехвата" на ручное управление.
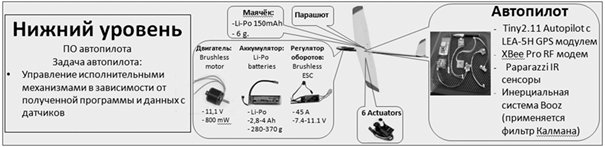
Нижний уровень управление осуществляется автопилотом БПЛА-агента (рис.7). Автопилот – устройство с микроконтроллером с системой реального времени. Основная задача автопилота состоит в управлении исполнительными механизмами (сервоприводами, мотоустановкой, дополнительным оборудованием), основываясь на записанной ему программе полёта и информации с датчиков (инерциальной системы, инфракрасных датчиков, датчиков давления и скорости и т. п.).
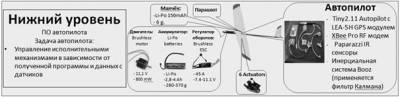 Рис. 7. Нижний уровень управления БПЛА-агентом
Рис. 7. Нижний уровень управления БПЛА-агентом Таким образом, аппаратная реализация трехуровневой системы, которая нужна для создания мультиагентной сети управления группой БПЛА, возможна
Алгоритмы групповой работы сети БПЛА
Рассмотрим два основных типа алгоритмов управления полётом БПЛА: алгоритм мониторинга местности на примере исследование экологической ситуации и алгоритм оптимизации полёта БПЛА на примере использования термических потоков для увеличения дальности полёта [6].
При использовании группы БПЛА для мониторинга местности работа системы организуется следующим образом:
• Выбирается тип задачи (в выбранном примере – поиск нефтяных пятен и источника их образования).
• В зависимости от площади исследуемой территории, количества БПЛА в группе и их характеристик территория разделяется на участки, и формируются отдельные задачи для каждого члена группы (для выбранного примера задача будет стоять таким образом: поиск аномалии интенсивности цвета поверхности акватории).
• В микрокомпьютер каждого БПЛА группы записывается глобальная задача (параметры исследуемой территории и т. п.) и отдельная задача этого БПЛА-агента.
• Каждый агент приступает к выполнению поставленной ему задачи.
Когда в зону Wi-Fi видимости одного БПЛА из группы попадает другой при "общении" происходит передача между агентами накопленной информации и, при необходимости, взаимное уточнение отдельных задач. Таким образом, по ходу выполнения частной задачи, все агенты накапливают информацию о ходе решении общей задачи группы, а также локально принимают решения о корректировке своих частных задач для более эффективного выполнения общей. Например, для выбранного нами примера, группа БПЛА исследует территорию на предмет нефтяных пятен, все БПЛА исследуют разные квадранты. При обмене информацией между членами группы выясняется наличие пятен в одном из квадрантов. По ходу выполнения задания вся группа перестраивает задачу, которая сводится к поиску источника разлива нефти.
Базовые наземные станции, обеспечивая связь с центром обработки данных (ЦОД), принимают/передают информацию от БПЛА, находящихся в их зоне видимости или поддерживающих связь через Интернет. Т.к. в процессе общения между БПЛА информация о выполнении общей задачи накапливается во всех микрокомпьютерах группы, то данные даже от тех самолетов, которые редко выходят на связь, все равно попадает в ЦОД.
Полученная в ЦОДе информация обрабатывается и визуализируется для заказчика (выдается карта с нанесенными исследуемыми характеристиками).
Наличие обратной связи с мобильными агентами (БПЛА) позволяет оперативно формировать из ЦОДа инструкции по корректировке их заданий.
Такой алгоритм действия группы подходит к любым задачам визуального мониторинга территории. Основные отличия будут состоять в типе искомого сигнала и в соответствующем дополнительном оборудовании для поиска этого сигнала.
Программирование бортовых микрокомпьютеров БПЛА
Выше были показаны преимущества группового взаимодействия и принцип построения системы управления БПЛА, основанный на трехуровневой архитектуре. Такая архитектура системы управления БПЛА характеризуется разделением конкретных "обязанностей" между вычислительными блоками. Рассмотри логику и принципы разработки программ для трехуровневой архитектуры.
При работе трехуровневая система формирует управляющие воздействия на основе входных данных. Для корректного выполнения задания при создании управляющего воздействия в программе автопилота по принципу разных контуров управления формируются три последовательных набора данных, обеспечивающих:
• поддержание заданных параметров движения (управляющие воздействия на исполнительные механизмы, генерируемые автопилотом на основании данных, полученных от микрокомпьютера и систем навигации);
• корректировку курсу (данные для управления передаются автопилоту и формируются на основе данных навигационной системы и поставленной задачи для мобильного объекта);
• выполнение маршрута движения (формируются на базовой станции в зависимости от поступающей информации от мобильных объектов и поставленной задачи оператором).
Все три контура управления в конечном итоге формируют управляющий сигнал на исполнительные механизмы.
Первый контур - создание управляющего сигнала на основе поступающей информации из инерциальной и спутниковой систем навигации. Автопилот отслеживает отклонение мобильного объекта от заданных параметров движения на основе поступающей информации с инерциальных датчиков (таких, как инфракрасные датчики, магнитометры и гироскопы) и корректирует углы крена, скорость, высоту и др. для поддержания заданных характеристик движения мобильного объекта.
Для любого изменения в конструкции БПЛА или в программе его полета необходимо создавать новый код автопилота. Для того, чтобы каждый раз не заходить в программный код, в автопилоте предусмотрено изменение плана полета в процессе его выполнения. Как правило, это доступный для корректировок текстовый файл, в котором хранятся данные о координатах.
Обмен информацией между микрокомпьютером и автопилотом можно осуществлять посредством последовательного периферийного интерфейса (SPI, Serial Peripheral Interface).
В третьем контуре управления на основе поставленной глобальной задачи для группы мобильных объектов и частной задачи для члена группы выбираются точки маршрута. Первоначально точки маршрута формируются оператором на базовой станции на основе поставленной задачи. Глобальная задача записывается в микрокомпьютер, а начальные частные задачи для членов группы - в их автопилоты. В процессе полета изменения глобальной задачи посылаются микрокомпьютерам мобильных объектов группы, которые эти изменения обрабатывают и формируют новые частные задачи для автопилотов. Также, исходя из принятой информации от других мобильных объектов, в рамках глобальной задачи для более быстрого ее завершения микрокомпьютер может поменять частную задачу для автопилота. В описанном выше примере трехуровневой архитектуры обмен информацией между мобильными объектами и между мобильным объектом и базовой станцией происходит посредством различных модулей связи: радио-, Wi-Fi-, интернет-модема. Связь посредством GSM модема с выходом во всемирную систему компьютерных сетей - интернет в основном предусмотрена для передачи необходимой информации на сервер, доступ к которому можно осуществить с любого компьютера, подключенного к "всемирной паутине".
Конкретизируем алгоритм (протокол) взаимодействия мобильных объектов в группе без единого центра управления, но с единым центром сбора данных мониторинга некоторой территории с помощью различного оборудования для таких задач, как:
• визуальный поиск объекта на местности;
• поиск источника радиосигнала;
• поиск утечки газопродуктов;
• поиск источника магнитного излучения;
• поиск источника радиационного излучения и т.п.
Каждой комплекту данных (фотографии, набору данных по замеру химического состава и т.п.) приписывается свой индекс, который соответствует времени фиксации и координатам точки, в которой произведен сбор данных.
Если установилась связь с другим мобильным объектом, то происходит следующее:
• отправка набора индексов имеющейся информации;
• прием набора индексов;
• сравнение набора принятых индексов с имеющимся набором индексов;
• выделение новых индексов из принятого набора;
• отправка запроса на получение новых данных с новыми индексами;
• принятие запроса на отправку индексов;
• формирование пакета данных на основе запрошенных индексов;
• отправка данных;
• принятие новых данных, запись в память.
На основе новых данных микрокомпьютером может быть принято решение о смене программы для автопилота для корректировки района поиска.
Применение группы мобильных объектов повышает гарантию выполнения задачи мониторинга местности. Например, возможна ситуация, при которой один из мобильных агентов выходит из строя. Это может быть резкое падение одного из мобильных объектов или выход из строя средства связи этого члена группы. Для завершения выполнения глобальной миссии для группы возникает задача изменить маршруты других объектов для покрытия всего исследуемого участка. При этом алгоритм работы мобильного объекта такой:
• завершить свою задачу;
• сравнить имеющиеся данные со всей картой необходимых данных в глобальной задаче;
• выделить область данных соседних участков;
• определить незаполненные данные в соседних участках;
• если есть незаполненные данные, то сформировать новый маршрут для автопилота;
• если все данные заполнены, отправить сообщение о завершении задачи.
При выполнении такого алгоритма мобильный объект после завершения своей задачи определяет, нужно ли помочь соседям. Если да, то расширяет поле своей работы.
При отправке данных на базовую станцию, необходимость хранить эти данные в микрокомпьютере отпадает, и в базе данных ставится пометка о времени отправки этой информации на сервер. Далее при необходимости освобождения места она стирается из памяти микрокомпьютера. При мониторинге территории данные с близкими координатами отмечаются как повторные, но с разным временем получения, и сравниваются на сервере с целью поиска изменений.
Обмен информацией мобильного объекта с базовой станцией происходит в тот момент, когда первый входит зону видимости базовой станции. Такая связь осуществляется за счет стабильного радиоканала с дальностью действия 1-2 км. На большем удалении мобильный объект может передавать информацию через подключение к глобальной сети Интернет через связь GSM. Передача информации по такому каналу может быть прервана из-за сбоев в связи при использовании его в воздухе и на значительном удалении от вышек GSM. В связи с этим алгоритм отправки информации такой:
• создать пакет с полученными данными в установленном интервале времени (например, фото- изображение сделанные за первую минуту сбора данных);
• сжать пакет;
• если нет пакетов в очереди отправки, то отправить сжатый пакет;
• если есть очередь отправки, то поставить пакет в очередь отправки;
• после отправки пакет и получения подтверждения доставки поставить отметку в индексах – отправлено на сервер. В противном случае пакет считается неотправленным.
В ЦОДе данные обрабатываются для извлечения необходимой информации. Для обработки фотографий применяются программные приложения с алгоритмами распознавания образов, выделяются фотографии одинаковой местности и на них определяются изменения. На выходе потребитель получает фотографии с отмеченной наиболее важной информацией. Одним из результатов обработки данных может стать формирование новой глобальной миссии для группы мобильных объектов.
Заключение
В настоящее время существует ряд технических проблем, сдерживающих развитие БПЛА. Наиболее существенной является задача обеспечения передачи информации по каналам связи между «беспилотником» и наземным пунктом управления в необходимом количестве, с заданной скоростью и без искажения. Данная задача решается путем увеличения пропускной способности и помехоустойчивости каналов передачи информации, а также сосредоточения на борту БПЛА максимума устройств, работающих в автономном (программном) режиме без необходимости постоянного обмена информацией с пунктом управления. Для выполнения задачи решается вопрос обеспечения связи с БПЛА через спутниковые каналы как наиболее устойчивые и надежные.
Другая проблема – уязвимость самих каналов передачи данных между БПЛА и пунктом их управления. Эта проблема решается за счет закрытия линий связи, применения автономных БПЛА, использования спутниковых ретрансляторов и т.п.
Еще одна организационная и техническая проблема заключается в необходимости совместного применения группировки БПЛА в единых боевых порядках, а также совместно с пилотируемыми летательными аппаратами. Уже к 2010-2113 гг. в США планируется создать системы, позволяющие реализовать с борта самолета типа F-22 управление группой боевых беспилотных летательных аппаратов. К 2015 г. американские специалисты планируют иметь все технологии, позволяющие реализовать в реальном времени процессы, определяющие функционирование боевой беспилотной авиации.
Требует также своего решения проблема распознавания целей боевыми БПЛА при применении бортовых ударных средств. Удары по своим войскам и по мирным объектам очень болезненно воспринимаются во всем мире. Поэтому пока невозможно полностью исключать участие человека в контуре управления полетом БПЛА. Важнейшая роль должна принадлежать БПЛА на начальном этапе любого военного конфликта. В условиях, когда система противовоздушной обороны противника обладает большим потенциалом и не выведена из строя, БПЛА могут сыграть ведущую роль в выполнении разведывательных, ударных и других задач, что позволит избежать потерь в пилотируемых летательных аппаратах и личном составе.
Список литературы
1. Куряча О. «Роботы на поле боя. Солдаты завтрашнего дня» // Robotics.1. - URL: http://robotics.com.ua/shows/series_robots_and_humans/572-robots_on_the_battlefield_soldiers_of_tomorrow
2. Корсунский А.С., Маттис А.В., Масленникова Т.Н. «О некоторых аспектах защиты информации в беспилотных и роботизированных средствах военного назначения» // Морские информационно-управляющие системы. − 2012. − No 1. − С. 16−23.
3. https://ru.wikipedia.org/wiki/беспилотный_летательный_аппарат
4. Попов В. А., Федутинов Д. В. «Развитие направления миниатюрных беспилотных летательных аппаратов за рубежом» - ФГУП «ГосНИИАС».
5. STANAG 7023/AEDP-9 NATO Primary Image Format. – www.nato.int/structur/AC/224/standard/7023/7023.htm.
6. Граничин О. Н., Кияев В.И. «Информационные технологии в управлении». М.: Издательство «Бином», 2008, 336 с.
7. Фельдбаум А.А. «О проблемах дуального управления» В кн.: Методы оптимизации автоматических систем. – М.: Наука. 1972.
8. http://www.slyusar.kiev.ua/UAV-1.pdf - статья В. В. Слюсара. Передача данных с борта БПЛА (2010)
9. http://moole.ru/blog/israel-ahead-of-the-rest/news/333440-piloty-ostajutsja-na-zemle-drony.html – рисунок БПЛА в разрезе