| Статистика |

Онлайн всего: 1 Гостей: 1 Пользователей: 0 |
|
Промышленная сеть для ускорителей. Управление научными приборами
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ЯДЕРНЫЙ УНИВЕРСИТЕТ "МИФИ"
Факультет «Автоматики и электроники»
Кафедра «Микро- и наноэлектроники»
Домашнее задание №1
на тему:
«Промышленная сеть для ускорителей. Управление научными приборами»
Подготовил: студент группы А9-11 Фелицын В.А.
Проверил: доцент Лапшинский В.А
Москва 2014
СОДЕРЖАНИЕ
ОПРЕДЕЛЕНИЯ, ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ...................3
ВВЕДЕНИЕ.............................................................................4
1. Промышленные сети. Виды.............................................6
2. Структура сети для управления научными приборами ....10
3. Адаптер Ethernet и элементная база..............................12
Заключение.........................................................................15
Список источников...............................................................16
ОПРЕДЕЛЕНИЯ, ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
ТЗЧ – тяжелая заряженная частица
ИМС – интегральная микросхема
ИТЭФ – Институт теоретической и экспериментальной физики
ПК – персональный компьютер
АСУ – автоматическая система управления
ОСРВ – операционная система реального времени
SPI – Serial Peripheral Interface – последовательный периферийный интерфейс
OSI – Open Systems Interconnection basic reference mode - базовая эталонная модель взаимодействия открытых систем
ВВЕДЕНИЕ
Ускоритель - класс устройств для получения заряженных частиц (элементарных частиц, ионов) высоких энергий.
Для того чтобы исследовать свойства материи на расстояниях меньше чем 10-12 см. необходимо иметь пучки ускоренных частиц, энергия которых превышает десятки МэВ. Рождение новых частиц происходит в результате преобразования кинетической энергии налетающей частицы в результате взаимодействия с другой частицей.
Основными источниками пробных частиц в субатомных экспериментах являются ускорители. Необходимость использования ускорителей для исследования структуры микромира очевидна. Во-первых, атомные ядра и элементарные частицы занимают очень малые области пространства, и проникновение в эти области требует высокой разрешающей способности зондирующего пучка, обеспечивающей взаимодействие отдельной пробной частицы с отдельным микрообъектом. Во-вторых, чем меньше микрообъект, тем он прочнее и проведение экспериментов с перестройкой или разрушением внутренней структуры такого объекта также требует большей энергии.
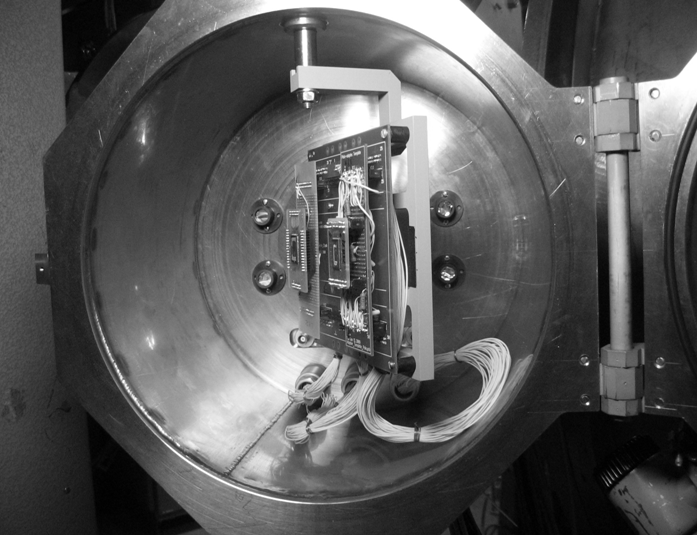
В России такие эксперименты проводятся в г. Дубна на циклотроне У-400М, на установках в Гатчине и в ИТЭФ [1]. Одним из таких экспериментов является исследование эффектов, связанных с воздействием ТЗЧ на ИМС. Для этого исследуемые на воздействие ТЗЧ образцы микросхем устанавливаются в активной зоне ускорителя внутри вакуумной камеры, внешний вид которой представлен на рис. 1.
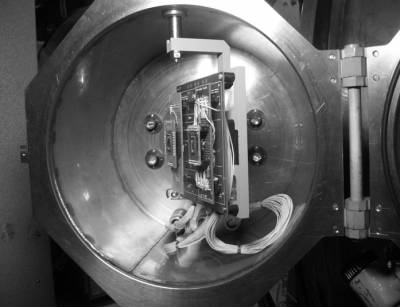
Рис. 1. Внешний вид вакуумной камеры для испытаний микросхем на стойкость к воздействию ТЗЧ (циклотрон У-400м, г. Дубна)
Для обеспечения нужных режимов работы микросхем и возможности измерения их электрических параметров во время работы циклотрона необходима система дистанционного управления. Это вызвано тем, что существует опасность для здоровья экспериментатора при нахождении в комнате с вакуумной камерой ускорителя во время работы установки. Поэтому управление осуществляется из комнат, удаленных от зоны проведения эксперимента. Вакуумные камеры расположены вдоль окружности циклотрона (т.е. их много), и поэтому имеется возможность облучения огромного количества образцов. Для контроля режима работы микросхем и снятия их электрических характеристик во время облучения в вакуумной камере циклотрона используется система термостабилизации. Для получения электрических характеристик облученных микросхем вместо системы термостабилизации используется измерительное устройство MERA, которая находится вне зоны эксперимента. Тут появляется необходимость в организации сети для передачи и приема данных между ПК, системами термостабилизации (измерительными устройствами MERA), с которыми связаны облучаемые микросхемы. Эта сеть должна удовлетворять следующим требованиям:
1) Производительность, т.к. измерение электрических параметров и установка температуры облучаемых образцов происходит в режиме реального времени.
2) Доступность и простота реализации канала передачи данных.
3) Дальность действия до 100 м, т.к. комнаты удаленного управления находятся от зоны эксперимента в пределах 100 метров.
4) Возможность управления несколькими измерительными устройствами и системами термостабилизации с помощью одного ПК.
5) Минимальная стоимость аппаратной реализации.
Этим требованиям отвечают промышленные сети, о которых далее пойдет речь.
Замечание: измерительное устройство MERA и система термостабилизации отличаются функционалом. Измерительное устройство MERA может снимать электрические характеристики и устанавливать электрический режим работы большого количества образцов. Система термостабилизации может устанавливать электрический и температурный режим работы, снимать показания с датчиков внутри вакуумной камеры ускорителя и измерять электрические характеристики облучаемых образцов, но в меньшем количестве на одно такое устройство.
1. Промышленные сети. Виды
Промышленная сеть – это сеть передачи данных, связывающая различные датчики, исполнительные механизмы, промышленные контроллеры, используемая в промышленной автоматизации, а также набор стандартных протоколов обмена данными, позволяющих связать оборудование различных производителей.
Исходя из статьи [2], cуществует несколько видов протоколов промышленных сетей:
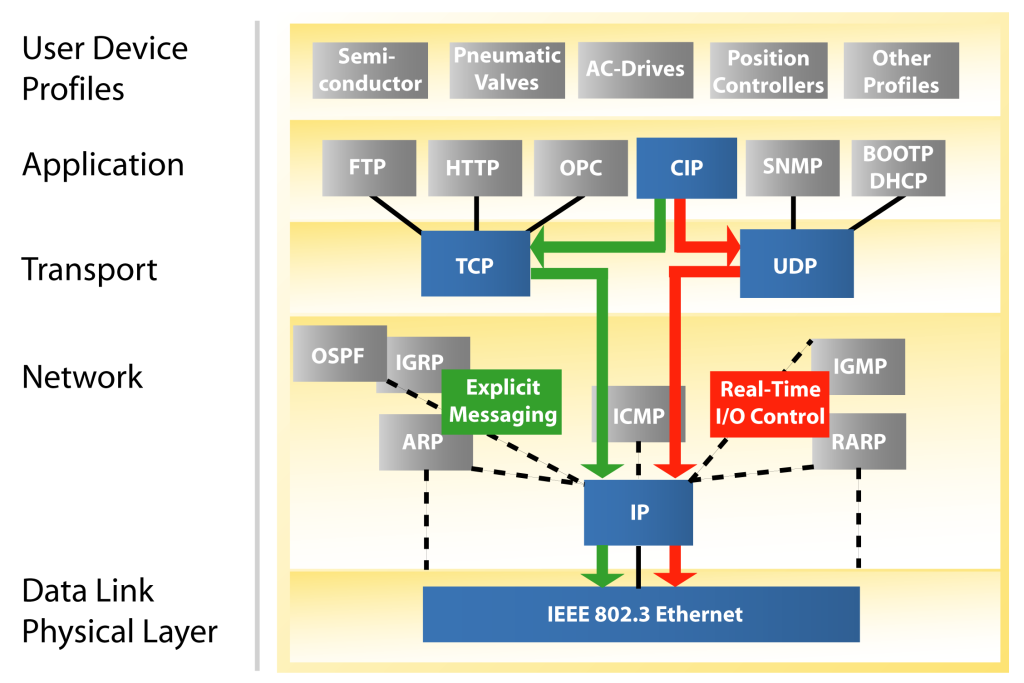
1) EtherNet/IP (Ethernet Industrial Protocol) – это открытый протокол уровня приложений, разработанный совместно международными ассоциациями ControlNet International, Open DeviceNet Vendors Association, Industrial Ethernet Association. Если обращаться к семиуровневой модели OSI, на первых четырех уровнях (физическом канальном сетевом и транспортном) изменений в структуре нет. Структура Ethernet/IP изображена на рис. 2.
Рис. 2. Ethernet/IP в модели OSI
Используется та же физическая среда 802.3, MAC-адреса, протокол IP, протоколы TCP и UDP. На прикладном уровне (с 5-го по 7-й) используется уже специальный объектно-ориентированный протокол CIP (Common Industrial Protocol), применяемый также в сетях ControlNet и DeviceNet. Функционирование в режиме реального времени обеспечивается специальным расширением протокола CIP – CIPSync, основанным на протоколе временной синхронизации IEEE 1588. Для установления соединения и передачи некритичного по времени трафика используется TCP, преимуществом которого является гарантированность доставки данных. Для критичных ко времени доставки данных необходим UDP, работающий в режиме адресной или многоадресной посылки данных от отправителя к получателю.
Комментарий: использование в EtherNet/IP протокола UDP для передачи критичного ко времени доставки трафика вносит определенную погрешность и непредсказуемость в режим передачи. Несмотря на это Ethernet/IP условно можно назвать протоколом реального времени для тех случаев, где максимальная погрешность для времени доставки данных удовлетворяет условиям технологического процесса. Например, для сегмента сети с топологией «звезда», где данные от 8 источников собираются одним клиентом, гарантировано время доставки 7 мс.
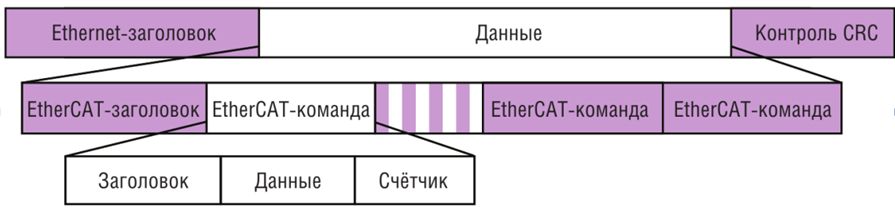
2) EtherCAT (Ethernet for Control Automation Technology) – протокол, изначально разработанный компанией Beckoff для контроля движения по сети Ethernet реального времени. Сеть EtherCAT базируется на архитектуре Master-Slave, может сосуществовать с сетью Ethernet 9также с EtherNet/IP). Протокол EtherCAT требует режима Full-duplex, зато может быть некритичным по отношению к топологии (звезда, кольцо, шина). Данный протокол может работать в режиме как реального, так и недетерминированного времени. Первый режим, называемый EtherType, работает только в EtherCAT-сегменте, не использует IP-протокол и, следовательно, несовместим с Ethernet. Второй использует для передачи трафика протоколы UDP/IP, совместим с Ethernet, но уже не в полной мере удовлетворяет условиям реального времени. Ведущее устройство (Master) организует обмен циклично. Данные EtherCAT передаются в виде кадров, упакованных в стандартные фреймы Ethernet, но с большим приоритетом. Ведомые устройства в сети только выполняют команды ведущего. Формат данных в EtherCAT представлен на рис. 3.
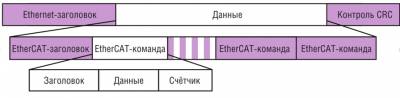
Рис. 3. Формат данных в протоколе EtherCAT
Комментарий: быстродействие EtherCAT позволяет опрашивать 1000 ведомых устройств ввода/вывода с циклом в 30 микросекунд.
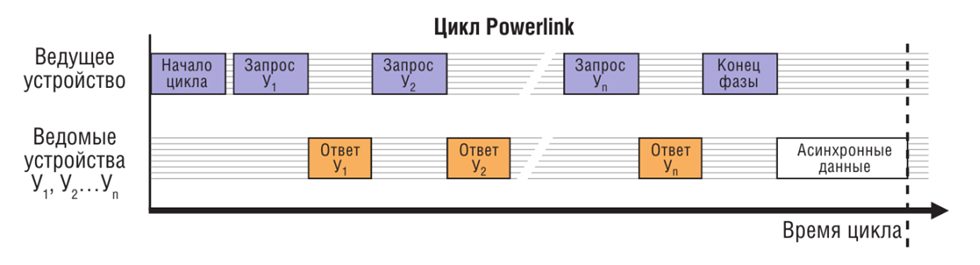
3) Протокол Powerlink был разработан австрийским производителем коммуникационного оборудования Bernecker & Rainer. Принцип организации сетей с использованием протокола Powerlink основан на разделении сети на сегменты недетерменированного и реального времени. Последний необходим, как правило, на машинном уровне промышленной сети, который и так выделяется в отдельный сегмент в целях защиты от внешних данных. На физическом уровне модели OSI в сегменте Real-Time используются стандартные IP-пакеты данных, архитектура клиент-сервер, обычные кабели согласно IEEE 802.3. Для обеспечения условий реального времени в рамках протокола Ethernet цикл передачи данных в сети по методу, называемому Slot Communication Network Management (SCNM), осуществляется по строгому графику в 2 приема: первый – для критичных ко времени доставки данных и второй для графика с низким приоритетом. Ведущее устройство определяет график этих фаз передачи данных всем участникам (ведомым устройствам) сегмента Real-Time, что заодно исключает образование коллизий в сети. Рабочий режим делится на три фазы: старт цикла (синхронизация по времени ведомых устройств с ведущим), изохронная (циклическая) фаза (для передачи данных с высоким приритетом), асинхронная фаза фаза (данные Ethernet). Схематично этот процесс представлен на рис. 4.
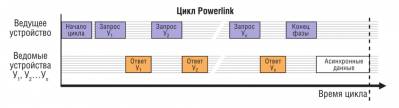
Рис. 4. Организация цикла передачи данных протокола Powerlink
Комментарий: при линейном соединении ведущего и ведомых устройств в отдельном сегменте сети протокол Powerlink относится к протоколам жесткого реального времени. По скорости он лишь немного уступает EtherCAT и гарантирует время цикла передачи данных в пределах 200 мкс с точностью 1 мкс.
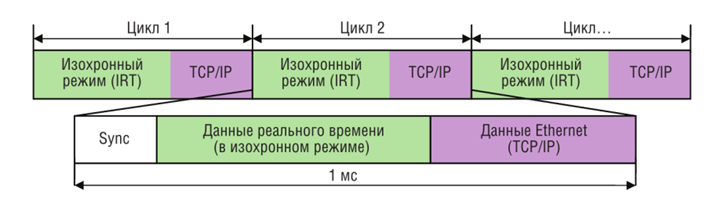
4) PROFINET – наиболее известный стандарт Ethernet реального времени, совместимый со стеком TCP/IP. Протокол изначально разработан компанией Siemens, стандартизован по IEC 61158 и сейчас находит применение в устройствах целого ряда производителей. Существует две концепции применения протокола PROFINET: PROFINET IO (распределенные системы ввода-вывода) и PROFINET CBA (модульный системы управления, объединение сетей PROFINET). Более распространенным случаем является PROFINET IO, предполагающий непосредственное подключение к сети устройств. Все устройства в сети PROFINET IO можно разделить на 3 типа: IO Controller (ПЛК или иной контроллер, мастер сети), IO Supervisor (станция оператора, HMI, станция управления), IO Device (распределенные датчики, исполнительные механизмы, ведомые устройства сети). Имеется 3 режима работы протокола, каждый со своей степенью детерминированности: PROFINET V1, PROFINET SRT и PROFINET IRT. Первый вариант обеспечивает время ответа системы в пределах 10-100 мс и используется преимущественно для администрирования устройств сети. PROFINET SRT работает на порядок быстрее: 5-10 мс, реализован целиком на программном уровне, в качестве транспортного протокола используется стек TCP/IP. PROFINET IRT является третьей «итерацией», именно он используется в системах жесткого реального времени. Он на порядок быстрее второй «итерации» и гарантирует время цикла 1 мс с точностью 1 мкс. Конечно, для такой скорости работы уже потребовалась аппаратная реализация. Поэтому каждый участник сети имеет встроенный контроллер, ответственный за синхронизацию (используется видоизмененный IEEE 1588) и обмен данными по PROFINET. Организация обмена данными в жестком реальном времени чем-то схожа с Powerlink: обмен данными происходит жесткотактируемыми циклами, в которых есть фаза изохронной (критической ко времени доставки) передачи данных и фаза передачи данных в формате TCP/IP. Схематично передача данных показана на рис. 5.
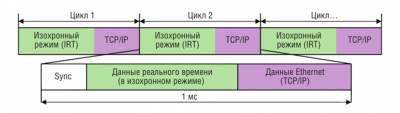
Рис. 5. Организация обмена данными в PROFINET IRT
5) Протокол IEEE 1588, также известный как PTP (Precision Time Control), определен как «Протокол для высокоточной синхронизации независимых часов различных устройств в распределенных системах измерения и контроля». Используется (или может использоваться) во всех перечисленных протоколах реального времени в качестве механизма синхронизации. Для работы в реальном времени каждый абонент должен иметь аппаратные часы реального времени. Алгоритм синхронизации следующий. Все ведущие часы периодически сверяются с мастер-часами и рассылают следующие посылки (Follow-up message) с точным измерением. Ведомые часы сравнивают время посылки со временем получения и корректируют свое время. Мастер-часы выбираются протоколом автоматически, исходя из их точности, разрешения и пр. Они могут быть специальным внешним устройством со спутниковой синхронизацией. Протокол IEEE 1588 часто применяют в точных измерительных системах, в энергетике для оперативного контроля величин токов и в других системах жесткого реального времени.
Протоколы, приведенные выше, в различной степени модифицируют стандартный стек TCP/IP, добавляя в него:
1) функции синхронизации;
2) новые алгоритмы сетевого обмена;
3) диагностические функции;
4) методы самокорректировки.
Канальный и физический уровни Ethernet при этом остаются неизменными, что позволяет использовать данные протоколы в существующих сетях Ethernet с использованием стандартного сетевого оборудования.
Все перечисленные выше протоколы могут быть использованы для управления системой термостабилизации и измерительными системами MERA. Для этого используется Ethernet-адаптер с возможностью перепрограммирования и отладки.
2. Структура сети для управления научными приборами
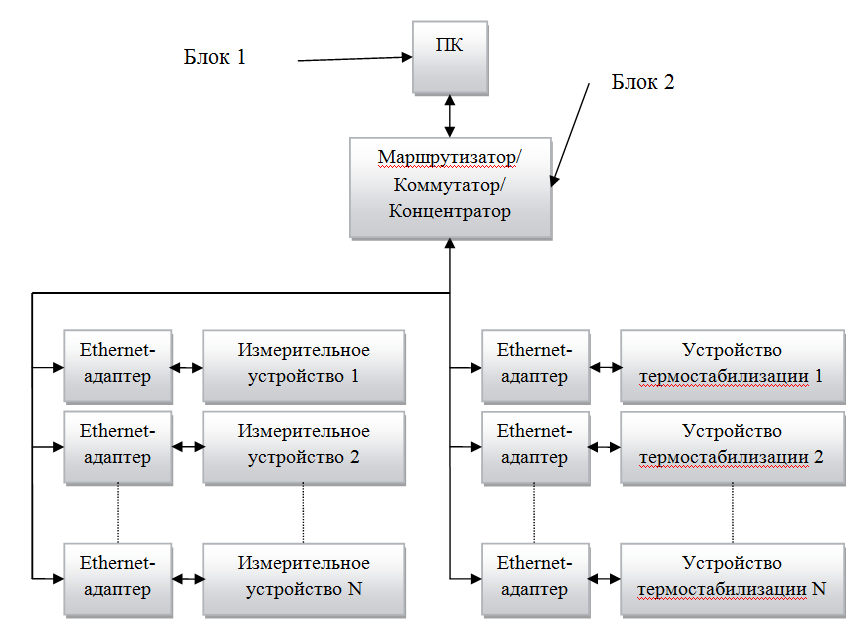
Сеть, которая реализует связь между ПК и устройствами, изображена на рис. 6.
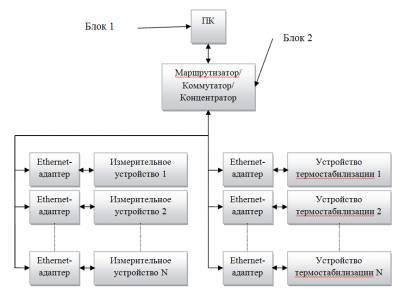
Рис. 6. Структура сети для управления устройствами [size=11]
[size=12]На ПК (Блок 1 на рис. 6) необходимо иметь операционную систему реального времени (ОСРВ), которая поддерживает выбранный сетевой протокол. Эта необходимость объясняется тем, что данная сеть является промышленной сетью. Нет никакого смысла в использовании промышленной сети, если на ПК (управляющем устройстве) стоит операционная система общего назначения (ОС семейства Windows, кроме Windows CE, некоторые ОС из семейства UNIX), т.к. там не гарантируется передача данных на управляемые устройства за определенный промежуток времени. Операционными системами реального времени являются FreeRTOS, QNX, RTLinux, VxWorks.
Выбор связующего ПК и Ethernet-адаптеры сетевого устройства (Блок 2 на рис. 6) определяется протоколом Ethernet. Т.к. используются протоколы, предназначенные для промышленных сетей, то оптимальным вариантом такого сетевого устройства является коммутатор. Если бы это был концентратор, то для такого большого количества устройств возникало много коллизий, вследствие чего появляется большая вероятность утери данных от устройств и скорость передачи данных также сильно падала (скорость передачи данных в этом случае обратно пропорциональна количеству устройств в сети и количеству возникающих коллизий). Поэтому сеть в совокупности с концентратором в этом случае не будет промышленной. Если брать маршрутизатор, то он дороже, чем коммутатор (для сравнения, в Yandex.Market средняя цена коммутатора Cisco SF100D-08 на октябрь 2014 года составляет 1400 руб., а средняя цена маршрутизатора Cisco RV082 составляет 24000 руб.).
Ethernet-адаптер является преобразователем интерфейса Ethernet в RS-232, поскольку измерительные устройства MERA и системы термостабилизации работают через интерфейс RS-232. Этот интерфейс планируется в будущем заменить на Ethernet путем интеграции интерфейсного контроллера в данные устройства.
Выбор кабеля для связи устройств в сети определяется дальностью расположения комнаты с вакуумной камерой ускорителя от комнат дистанционного управления, а также стандартом, который поддерживается контроллером в Ethernet-адапторе (поддерживаемый стандарт 802.3i, см. раздел 0). Т.к. расстояние между комнатами не более 100 м, то в таком случае подойдет витая пара категории 3 (CAT3). Помехоустойчивость, которая обеспечивается свойствами витой пары, вполне достаточна.
3. Адаптер Ethernet и элементная база
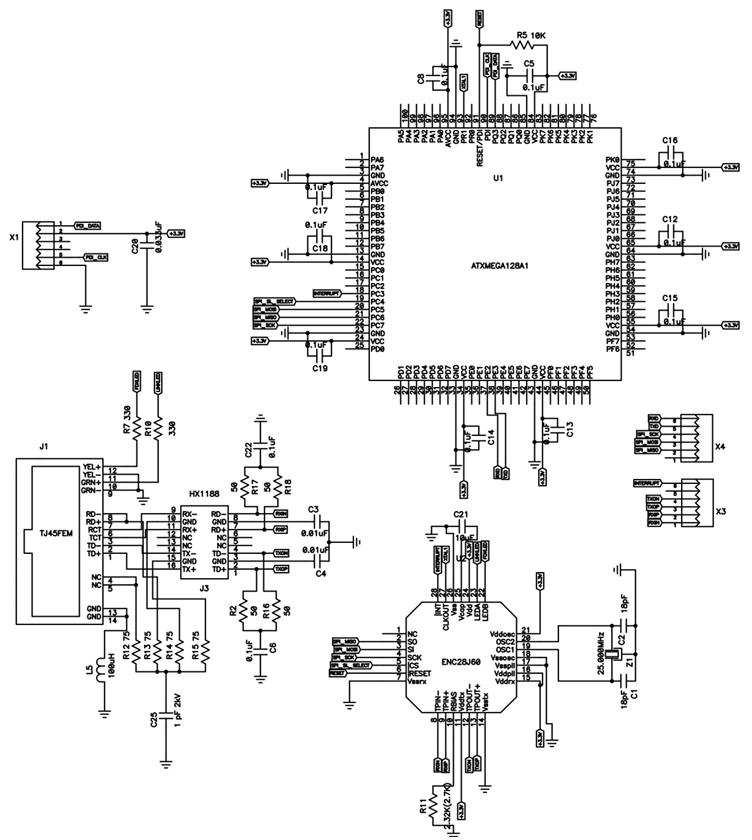
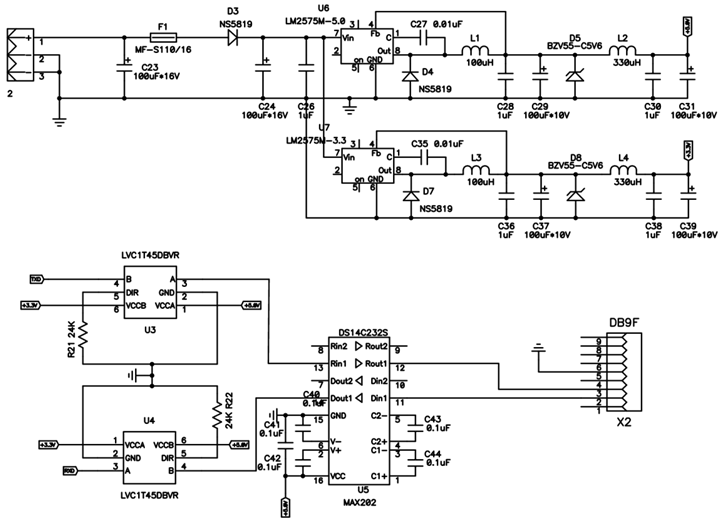
Ethernet-адаптер является первым переходным этапом в процессе модернизации измерительного устройства и системы термостабилизации. Его принципиальная схема изображена на рис. 7, 8, на рис. 9 изображена структурная схема.
Рис. 7. Принципиальная схема Ethernet-адаптера (I часть)
Рис. 8. Принципиальная схема Ethernet-адаптера (II часть)
Рис. 9. Структурная схема адаптера [3]
Как видно на рис. 7, в адаптере присутствуют разные микросхемы, одна из которых микросхема ENC28J60 производства Microchip, которая и является контроллером Ethernet. Под Ethernet будет подразумеваться конкретный стандарт IEEE 802.3i, который и поддерживается ENC28J60. В этом стандарте физический уровень — это 10BASE-T с пропускной способностью 10 Мбит/с по витой паре (Twisted pair) [3]. На данном этапе разработки и модернизации измерительного устройства MERA такой пропускной способности вполне хватает. По SPI организовывается связь между контроллерами ENC28J60 и ATxmega128, позволяющая выполнять инициализацию, настройку контроллера Ethernet, обработку пакетов данных, приходящих из сети, и отправку данных в сеть. В прошивке микроконтроллера ATxmega128 реализуется IP-стек, позволяющий прикладной задаче общаться с задачами на других системах с помощью протоколов, которые выше канального уровня модели OSI. В данном случае это протоколы реального времени, реализующие промышленную сеть.
Заключение
В процессе выполнения домашнего задания мы ознакомились с промышленными сетевыми протоколами Ethernet, способом организации промышленной сети и разработкой Ethernet-адаптера.
Список источников
1. А.С. Бакеренков, В.В. Беляков, Н.В. Варламов, А.М. Никитин, В.С. Першенков, В.В. Шуренков, Е.С. Волкодаев, T.С. Ермоленко. Система задания и контроля температуры при экспериментах на циклотроне по исследованию одиночных сбоев в микросхемах // Ядерная физика и инжиниринг. – 2011. – том 2. – номер 6.
2. Лопухов И. Сети Real-Time Ethernet: от теории до практической реализации // Современные технологии автоматизации. – 2010. – номер 3.
3. Сообщество EasyElectronics.ru [Электронный ресурс]. – Электрон.дан. – Режим доступа: http://we.easyelectronics.ru/electro-and-pc/podklyuchenie-mikrokontrollera-k-lokalnoy-seti-rabotaem-s-enc28j60.html – Загл. с экрана. |
| Категория: Домашние задания (по сетям МИФИ) | Добавил: Felicin (14.12.2014)
| Автор: Фелицын Влад
|
| Просмотров: 1373
| Рейтинг: 0.0/0 |
Добавлять комментарии могут только зарегистрированные пользователи. [ Регистрация | Вход ] |
|