Российский Университет Дружбы Народов
Инженерная академия
Кафедра кибернетики и мехатроники
Курс «Введение в наноинженерию»
«МЭМС НЭМС для роботов»
Студентка ИИб-201 (2 курс): Гусарова Л.В
Преподаватель: доцент Лапшинский В.А.
Москва 2016 г.
Аннотация
В данной работе рассмотрены электромеханические системы МЭМС И НЭМС , имеющие непосредственное отношение к наноинженерии, а именно к наноэлектронике. Рассмотрены их свойства и применение. Освещены основные понятия о робототехнике, приведены примеры использования этих электромеханических систем непосредственно в данной отрасли.
В работе: рис. 10, стр. 16, источников 13.
Ключевые слова: МЭМС, НЭМС, наноэлектроника, робототехника.
Глоссарий терминологии, сокращения и обозначения
Нанотехнологии - область фундаментальной и прикладной науки и техники, имеющая дело с совокупностью теоретического обоснования, практических методов исследования, анализа и синтеза, а также методов производства и применения продуктов с заданной атомной структурой путём контролируемого манипулирования отдельными атомами и молекулами.
Наноинженерия (НИ) – научно-практическая деятельность человека по конструированию, изготовлению и применению наноразмерных (наноструктурированных) объектов или структур, а также объектов или структур, созданных методами нанотехнологий.
Наноматериалы - материалы, созданные с использованием наночастиц или посредством нанотехнологий, обладающие какими-либо уникальными свойствами, обусловленными присутствием этих частиц в материале.
Наноразмерные структуры – объекты, один из характерных размеров которых лежит в интервале от 1 до 100 нм.
МЭМС – микроэлектромеханические системы.
НЭМС – наноэлектромеханические системы.
Робототехника — прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой интенсификации производства.
Робот — автоматическое устройство, созданное по принципу живого организма, предназначенное для осуществления производственных и других операций, которое действует по заранее заложенной программе и получает информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком. При этом робот может как иметь связь с оператором (получать от него команды), так и действовать автономно.
Нанороботы - роботы, размером сопоставимые с молекулой (менее 100 нм), обладающие функциями движения, обработки и передачи информации, исполнения программ.
Содержание:
- Введение ……………………………………………………………………… стр 3
- Робототехника ……………………………………………………………….. стр 4
- Определения робототехники , роботов и их компоненты …………….. стр 4
- Почему МЭМС НЭМС нужны для робототехники ……………………. стр 6
- Понятие МЭМС НЭМС ……………………………………………………... стр 8
- Определение понятий МЭМС НЭМС …………………………………... стр 8
- Классификация и типы МЭМС НЭМС …………………………………. стр 11
- Примеры применения МЭМС НЭМС в робототехнике ………………… стр 13
- Заключение ……………………………………………………………………. стр 16
Список литературы …………………………………………………………….. стр 17
Приложение1. Контрольные вопросы…………………………...……………. стр 18
1. ВВЕДЕНИЕ
Одно из важнейших направлений использования нанотехнологий – наноэлектроника, т.е. разработка и промышленное изготовление наноэлектронных элементов, а также интеграция их с существующими технологиями для миниатюризации электронных устройств. В этом процессе можно выделить три этапа:
1) разработка наноэлектронных элементов
2) создание наноэлектронных схем
3) тестирование и определение функциональных характеристик как отдельных элементов, так и сложных конструкций на их основе.
Разработчикам МЭМС и НЭМС, современной микроэлектроники, приборов наноэлектроники, а также новых технологических процессов в этих направлениях интересны нанотехнологические комплексы – НАНОФАБЫ (рис. 1), которые могут быть реализованы в кластерных, многомодульных вариантах, легко перестраиваемых под нужды различных технологических процессов. На таких станциях возможны как моделирование требуемых элементов, так и аналитические исследования результатов технологических операций и свойств самих элементов.
$IMAGE1$
рис.1 Система НАНОФАБ 100, функционирующая в ЮФУ (Таганрог)
МЭМС представляют собой трехмерные микрообъекты и микромашины: моторы, насосы, турбины, микророботы, микродатчики или целые аналитические микролаборатории, выполненные на кремниевой подложке. Впервые о возможностях таких устройств заговорили еще в 1959 году. Развитие МЭМС-аппаратуры может иметь такие же последствия для научно-технического прогресса, какие оказало появление микроэлектроники на становление и современное состояние ведущих областей науки и техники. Эрик Дрекслер предложил идею механокомпьютера. Одиночная ячейка памяти состоит из струны нанометровых размеров, которая при воздействии на ее концы высокочастотного напряжения (с частотой в несколько мегагерц) изгибается. При определенной амплитуде напряжения струна принимает одно из конечных состояний (“1” или “0”), что как раз нужно для хранения информации. Преимущество идею также заключается в минимальном потреблении энергии. Объединение принципов механических и электронных вычислений позволит создать гибридные механоэлектрические НЭМС-транзисторы, которые работают по принципу переноса носителей заряда механическим путем. На сегодняшний день лучшее применение МЭМС – датчики или сенсоры [1].
2. РОБОТОТЕХНИКА
2.1 Определения робототехники, роботов и их компоненты
Робототехника — прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой интенсификации производства.
Робототехника опирается на такие дисциплины, как электроника, механика, телемеханика, информатика, а также радиотехника и электротехника. Выделяют строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
Робот — автоматическое устройство, созданное по принципу живого организма, предназначенное для осуществления производственных и других операций, которое действует по заранее заложенной программе и получает информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком. При этом робот может как иметь связь с оператором (получать от него команды), так и действовать автономно.
Внешний вид и конструкция современных роботов могут быть весьма разнообразными. В промышленном производстве широко применяются различные роботы, внешний вид которых (по причинам технического и экономического характера) далёк от «человеческого».
Классы роботов:
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Такие роботы производятся в напольном, подвесном и портальном исполнениях. Получили наибольшее распространение в машиностроительных и приборостроительных отраслях.
Мобильный робот — автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Такие роботы могут быть колёсными, шагающими и гусеничными (существуют также ползающие, плавающие и летающие мобильные робототехнические системы, см. ниже).
Компоненты роботов:
Приводы: это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух.
Двигатели постоянного тока: в настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов.
Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определённый угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как угол, на который был сделан поворот, заведомо известен контроллеру; поэтому такие двигатели часто используются в приводах многих роботов и станках с ЧПУ.
Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы весьма оригинален: крошечные пьезоэлектрические ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах.
Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животных. ( Рис.2)
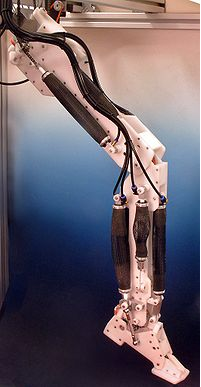
Рис. 2 Нога, работающая на воздушных мышцах
Электроактивные полимеры: Электроактивные полимеры — это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Впрочем, в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все ныне существующие их образцы неэффективны или непрочны.
Эластичные нанотрубки: Это — многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет волокну эластично деформироваться на несколько процентов. Человеческий бицепс может быть заменён проводом из такого материала диаметром 8 мм. Подобные компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека [10].
2.2 Почему МЭМС НЭМС нужны для робототехники
Лень — двигатель прогресса. И это не просто забавный оксюморон. Чего только люди ни придумают, лишь бы не работать! Все изобретения — от палки-копалки до калькулятора — преследуют лишь одну цель: превратить труд в отдых. При этом исповедуется принцип всеобщей миниатюризации. Вспомните размеры первых телевизоров, компьютеров и мобильных телефонов. Сегодня все это можно легко унести в карманах.
Стрежнем нанотехнологий является давнее стремление человечества приспособить в работу даже самые мельчайшие частицы материи – атомы.
В целом, все МЭМС можно разделить на две большие категории: сенсоры и актуаторы. Различаются они принципом своей работы. Если задача сенсора состоит в преобразовании физических воздействий в электрические сигналы, то актуатор выполняет прямо противоположную работу, переводя сигнал в какие-либо действия.
Самым распространенным МЭМС-устройством является акселерометр. Как уже говорилось выше, сфера его использования чрезвычайно обширна. Она охватывает мобильные телефоны, ноутбуки, игровые приставки, а также более серьезные устройства, такие как автомобили. Само предназначение акселерометра заключается в измерении кажущегося ускорения. В случае с мобильными телефонами он используется для многих целей. Например, для смены ориентации экрана. Или же выполнения каких-либо функций при «встряхивании» устройства.
Еще одним интересным датчиком, часто используемым вместе с акселерометром, является гироскоп. Его основное предназначение заключается в измерении угловых скоростей относительно одной или нескольких осей. Собственно, комбинация акселерометра и гироскопа позволяет отследить и зафиксировать движение в трехмерном пространстве.
Еще одной интересной микроэлектромеханической системой является магнитометр. Он, как и обычный магнитный компас, отслеживает ориентацию устройства в пространстве относительно магнитных полюсов Земли. Полученная же информация используется в основном в картографических и навигационных приложениях. В дополнение к магнитометру часто используется МЭМС-барометр.
Впервые МЭМС-микрофоны были использованы в телефонах Motorola в 2003 году. И прошло немало времени, прежде, чем микрофоны с такой архитектурой начали вытеснять традиционные электретные устройства. В сравнении с предшественниками МЭМС-микрофоны обеспечивают более четкую и качественную передачу звука [3].
Исходя из всего вышеперечисленного можно сделать вывод, что МЭМС и НЭМС нужны для робототехники. С помощью свойств акселерометра в робототехнике можно усовершенствовать уровень защиты роботов при изменении их скорости. На основе МЭМС разрабатываются сверхчувствительные сенсоры, которые могут улучшить взаимодействие робота с окружающим миром. С помощью гироскопа, усовершенствуется нахождение и ориентация роботов в пространстве. Магнинометр и барометр так же улучшают ориентацию в пространстве, а микрофон дополнительно помогает взаимодействовать с окружающей средой. Актуаторы, работающие на сигналах, могут использоваться так же для ориентации роботов в пространстве. Исходя из вышесказанного, мы понимаем, что без МЭМС и НЭМС технологий робототехника не смогла бы развиваться и совершенствоваться.
Нанороботы, или наноботы — роботы, размером сопоставимые с молекулой (менее 100 нм), обладающие функциями движения, обработки и передачи информации, исполнения программ. совершенствования и помогу в создании нанороботов.
Нанороботы, способные к созданию своих копий, то есть самовоспроизводству, называются репликаторами.
Другие определения описывают наноробота как машину, способную точно взаимодействовать с наноразмерными объектами или способной манипулировать объектами в наномасштабе. Вследствие этого, даже крупные аппараты, такие как атомно-силовой микроскоп можно считать нанороботами, так как он производит манипуляции объектами на наноуровне. Кроме того, даже обычных роботов, которые могут перемещаться с наноразмерной точностью, можно считать нанороботами.
Кроме слова «наноробот» также используют выражения «нанит» и «наноген», однако, технически правильным термином в контексте серьёзных инженерных исследований все равно остается первый вариант.
Уровень развития технологии
На данный момент (2016), нанороботы находятся в научно-исследовательской стадии создания. Некоторыми учёными утверждается, что уже созданы некоторые компоненты нанороботов. Разработке компонентов наноустройств и непосредственно нанороботам посвящён ряд международных научных конференций. Уже созданы некоторые примитивные прототипы молекулярных машин. Например, датчик, имеющий переключатель около 1,5 нм, способный вести подсчет отдельных молекул в химических образцах. Недавно университет Райса продемонстрировал наноустройства для использования их в регулировании химических процессов в современных автомобилях. Одним из самых сложных прототипов наноробота является «DNA box», созданный в конце 2008 года международной группой под руководством Йоргена Кьемса. Устройство имеет подвижную часть, управляемую с помощью добавления в среду специфических фрагментов ДНК. По мнению Кьемса, устройство может работать как «ДНК-компьютер», так как на его базе возможна реализация логических вентилей. Важной особенностью устройства является метод его сборки, так называемый ДНК оригами (англ.), благодаря которому устройство собирается в автоматическом режиме. В 2010 году были впервые продемонстрированы нанороботы на основе ДНК, способные перемещаться в пространстве. Летом 2016 г. ученым из Дрексельского университета удалось создать нанороботов для скорейшей доставки лекарств по венам. При помощи электромагнитного поля специалисты смогли развить высокую скорость у мельчайших роботов. Новая разработка облегчит отправку лекарственных средств по кровеносным сосудам организма. Свои выводы и детали изобретения были отражены в статье издания Scientific Reports. Электромагнитное поле воздействует на роботов, заставляя их вращаться. Соединенные в цепочку 13 нанороботов способны развиваться скорость до 17,85 микрометра в секунду. Ученые в ходе наблюдений выявили особенность, которая выражалась в способности разделяться на более мелкие цепочки при достижении максимальной скорости. Нанороботов можно даже направить в различные стороны при изменении направления магнитного поля.
Наноробот с десятицентовую монету
И другой перспективный американский проект, использующий микросистемные технологии: исследовательская группа, занимающаяся созданием электронных устройств и нанороботов, заявляет о создании нанороботов размером с монету (терминология авторов, корректнее было бы называть это устройство микророботом, или даже минироботом), которые способны производить десять тысяч движений в минуту. Проект называется NanoWalker и разрабатывается на базе лаборатории биотехнологий при Институте Технологий Массачусетса. Первая и главная особенность этих нанороботов состоит в том, что они уже сейчас способны передвигаться автономно — то есть "бежать и чинить" без проводов. Вторая особенность — это скорость перемещения роботов. Большинство существующих нанороботов далеки от совершенства: они не только вынуждены работать там, где их поместили, но, если и передвигаются, то делают это крайне медленно — одно движение в секунду (о размерах, правда, речь не идет – а между тем существуют роботы нанометровых размеров). Новое поколение умеет двигаться в трёх плоскостях, и достаточно быстро. Третья особенность роботов — сложность манипуляций: примитивные роботы могут выполнять движения грузчика — в одном месте взял — в другое положил. Роботы из Массачусетса умеют выполнять сложные задачи, требующие не только механических усилий.
3. ПОНЯТИЕ МЭМС НЭМС
3.1 Определение понятий МЭМС НЭМС
Микроэлектромеханические системы (МЭМС) — устройства, объединяющие в себе микроэлектронные и микромеханические компоненты.
Механическим компонентом может быть миниатюрное зеркальце — элемент системы сканирования, либо примитивный инерциальный датчик, способный определить характерные движения, которые пользователь проделывает со своим устройством.
МЭМС-устройства обычно изготавливают на кремниевой подложке с помощью технологии микрообработки, аналогично технологии изготовления однокристальных интегральных микросхем. Типичные размеры микромеханических элементов лежат в диапазоне от 1 микрометра до 100 микрометров, тогда как размеры кристалла МЭМС-микросхемы имеют размеры от 20 микрометров до одного миллиметра. (Рис.3)
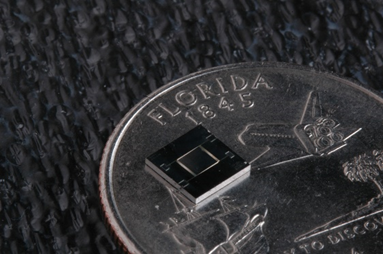
Рис. 3 МЭМС – сенсор
Наноэлектромеханические системы (НЭМС) - представляют собой класс устройств интеграции электрических и механических функций на наноуровне. НЭМС форма - следующий логический шаг миниатюризации так называемых микроэлектромеханических систем, или mems устройств. Название происходит от характерных размеров в нанометровом диапазоне, что приводит к низкой массе, высокой частоте механического резонанса, потенциально большим квантово-механическим эффектам. Применение акселерометры, или детекторы химических веществ в воздухе [11].
Только в конце 90_х началось освоение промышленного производства МЭМС, а сейчас МЭМС широко используются в самых различных сферах человеческой деятельности: в телекоммуникациях, медицине, транспорте и т.д. современные MEMS-системы (Рис. 4) на сегодняшний день являются ключевым фактором в развитии нанотехнологий. Именно на базе таких систем планируется создание наноманипуляторов и нанороботов [7].
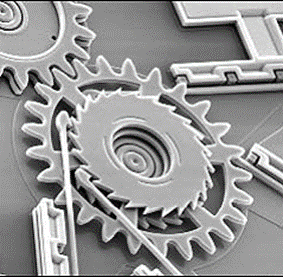
Рис. 4 Современные МЭМС-системы
Микроэлектромеханические устройства способны не только обрабатывать определенные данные, но и выполнять некоторые движения, то есть выступать в роли микророботов.
Если ИС обеспечила проводникам возможность “думать”, то МЭМС позволяет им “ощущать”, общаться и взаимодействовать с внешним миром. Поэтому без преувеличения можно сказать, что МЭМС – это новая волна полупроводниковой революции. По мнению экспертов, развитие МЭМС-аппаратуры может иметь такие же последствия для научно-технического прогресса, какие оказало появление микроэлектроники на становление и современное состояние ведущих областей науки и техники.
Изготовление МЭМС очень похоже на создание микросхем. Здесь также используется кремний-самый популярный в микроэлектронике материал, а технология создания МЭМС-устройств очень напоминает процедуру создания ИС. И в той, и в другой имеется замечательная возможность создавать необходимые структуры в едином технологическом процессе. И планарной, и МЭМС-технологии присущи осаждение материала, перенос изображений и удаление промежуточных слоев. Как правило, создание микромеханических изделий требует создания более толстых пленок, более глубокого травления, а сам технологический процесс имеет значительно больше этапов.
Как ни удивительно, но МЭМС-системы могут выступать не только в роли сенсоров и «мускулов» микро- и нанороботов. Они также могут быть основой нанокомпьютеров. История создания компьютеров начинается в девятнадцатом веке с универсальной механической машины Чарльза Бэббиджа (Рис.5). В 1833 г. английский ученый, профессор Кембриджского университета Чарльз Бэббидж разработал гигантский арифмометр с программным управлением, арифметическим и запоминающим устройствами. Аналитическая машина Бэббиджа стала предшественницей и прообразом современных компьютеров и машин с программным управлением. Как ни странно, но она была полностью механической. И это не мешало ей выполнять простейшие арифметические и логические операции, а также хранить полученные результаты[9].
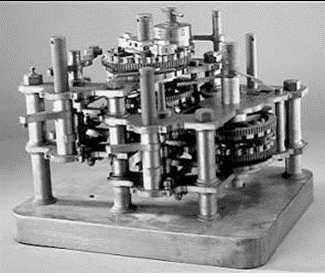
Рис. 5 Машина Чарльза Бэббиджа
Электронно-лучевая литография уже давно используется МЭМС-и нанотехнологами в качестве основного производственного инструмента. Она также является основным инструментом для производства микроэлектронных схем и ею пользуются при массовом производстве микросхем и процессоров. Так что для массового производства механопамяти не нужно будет использовать дополнительные устройства, выпуск готового продукта можно производить на уже имеющемся оборудовании. Одиночная ячейка памяти (Рис.6) состоит из струны нанометровых размеров, которая при воздействии на ее концы высокочастотного напряжения (с частотой в несколько мегагерц) изгибается. При определенной амплитуде напряжения струна принимает одно из конечных состояний (“1” или “0” соотв.), что как раз нужно для хранения информации. Маленькие размеры устройства позволяют ему достичь высокочастотных вибраций (в опытах-до 23,57 МГц). Эта частота отражает скорость чтения записанной информации. Для сравнения, винчестеры в современных ноутбуках характеризуются скоростью считывания информации в несколько сот килогерц.

Рис. 6 МЭМС ячейка памяти
Объединение принципов механических и электронных вычислений позволит создать гибридные механоэлектрические НЭМС-транзисторы, которые работают по принципу переноса носителей заряда механическим путем.
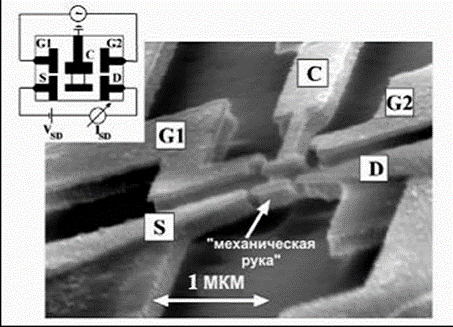
Приведем один пример. В 2001 году профессор Роберт Блайк из Висконсина, США, представил рабочий электромеханический маятник (Рис.7), который вибрировал в диапазоне радиочастот и мог переносить отдельные электроны от одного электрода к другому при активации “механической руки” устройства (т.е. работать как транзистор).
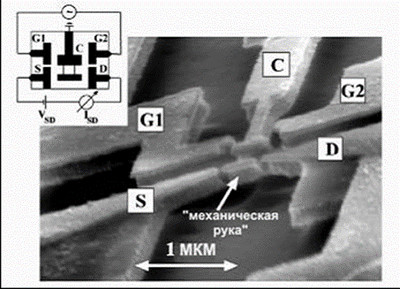
Рис. 7 Наномеханический осциллятор Блайка
2.2 Классификация и типы МЭМС НЭМС
Акселерометры
Чрезвычайно малый размер позволяет использовать MEMS в различных миниатюрных устройствах, начиная от механических часов и заканчивая имплантатами для человека. Самым распространенным МЭМС-устройством является акселерометр. Акселерометр – это прибор для измерения ускорения в одном или нескольких направлениях. Микроакселерометры можно определить, как акселерометры, созданные при помощи технологий микроэлектроники и являющихся МЭМС. Его характерной особенностью является малый размеры – не более нескольких десятков миллиметров. Наиболее распространенными применениями акселерометров являются: мобильные телефоны, автомобильное производство, элементы компьютерной техники, игровые консоли и т.д. Принцип работы акселерометров основан на измерении смещения инерционной массы относительно корпуса и преобразовании его в пропорциональный электрический сигнал. Емкостной метод преобразования измеренного перемещения является наиболее точным и надежным, поэтому емкостные акселерометры получили широкое распространение. Структура емкостного акселерометра состоит из различных пластин, одни из которых являются стационарными, а другие свободно перемещаются внутри корпуса. Между пластинами образуется конденсатор, величина емкости которого зависит от расстояния между пластинами. Под влиянием силы ускорения емкость конденсатора меняется. Современные интегральные датчики изготавливаются на кристалле кремния по технологии iMEMS (integrated Micro Electro Mechanical System). Структура датчика представляет собой кремниевую подложку, на которой расположен чип датчики и схема усиления сигнала.
По виду движений ИМ акселерометры делятся на осевые и маятниковые. В осевых акселерометрах конструкция упругого подвеса обеспечивает прямолинейное движение ИМ, а в маятниковых – угловое. Маятниковые акселерометры называют также угловыми или балочными. По виду преобразования энергии акселерометры подразделяются на: емкостные, пьезорезистивные, пьезоэлектрические и тепловые. По принципу измерения акселерометры делятся на приборы прямого и компенсационного измерения (преобразования). Основными характеристиками акселерометров является чувствительность, диапазон измерений, полоса пропускания частот, масштабный коэффициент, точность, быстродействие.
Гироскопы
Гироскоп – устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Его основное предназначение заключается в измерении угловых скоростей относительно одной или нескольких осей. Известно большое количество разнообразных схем ММГ (микромеханических гироскопов). Общим конструктивным признаком ММГ – вибрационных датчиков угловой скорости, является использование в них различных по конфигурации двухстепенных упругих подвесов чувствительного элемента (ЧЭ). Принцип работы ММГ заключается в создании относительно корпуса знакопеременного поступательного либо вращательного движения ЧЭ по одной из степеней свободы и измерении перемещений по другой степени свободы, возникающих под действием кориолисовых сил или гироскопических моментов при наличии переносной угловой скорости корпуса.
По виду движения инерционной массы в режиме движения и режиме чувствительности различают гироскопы LL-типа (linear-linear) или LL-гироскопы; гироскопы RR-типа (rotarerotare), или RR-гироскопы, и LR-типа или LR-гироскопы. В LL-гироскопах инерционные массы в режиме движения и режиме чувствительности совершают поступательные перемещения, в RR-гироскопах – вращательные перемещения, в LR (RL) – гироскопах – различные комбинации поступательных и вращательных перемещений инерционных масс. Каждый вид микрогироскопа характеризуется набором классификационных признаков, важнейшими из которых являются следующие.
1. Число измерительных осей
2. Число инерционных масс
3. Тип подвеса
4. Наличие кинематических связей
5. Вид перемещения инерционной массы
6. Тип привода (обратные преобразователи)
7. Тип датчика съема сигнала (обратные преобразователи)
МГ могут работать в режимах прямого и компенсационного преобразования (измерений).
Наряду с рассмотренными видами разрабатываются МГ, которые можно определять, как камертонные и волновые. Отличительным признаком камертонных МГ (КМГ) является наличие стержневых структур («ножек»). Существенно и то, что инерционная масса ножек, как правило, распределена вдоль их длины и имеется свободный, незакрепленный конец. При появлении перекрестной угловой скорости, вектор которой перпендикулярен к векторам количества движения элементарных масс, распределенных вдоль ножек, возникают силы инерции Кориолиса, генерирующие вторичные колебания ножек КМГ. Отличительным признаком волновых МГ является наличие резонаторов, имеющих форму кольца, которое с помощью упругих элементов подвеса скреплено с корпусом, либо форму стержня, закрепление которого в корпусе не препятствует его продольным и поперечным колебаниям.
Типовыми характеристиками МГ являются: диапазон измерений, чувствительность, полоса пропускания частот, масштабный коэффициент и его стабильность, перекрестная чувствительность, шум, температурная стабильность характеристик [8].
4.ПРИМЕРЫ ПРИМЕНЕНИЯ МЭМС НЭМС В РОБОТОТЕХНИКЕ
Биомиметический наноробот
Биомиметика - создание устройств, приборов, механизмов или технологий, идея и основные элементы которых заимствуются из живой природы.
Разработанная фигура микроробота МЭМС. Компоненты рамы, поворотные приводы и механизм соединения были изготовлены из кремниевых пластин. Части рамы состоят из верхней рамки, задней рамки, передней рамки и рамки. Поворотные приводы состоят из ротора, провод GND, вала и четырех кусков искусственных мышц - проводов. Поворотный генерируемый привод передвижения робота путем подачи электрического тока на искусственные мышцы проводов. Провод ссохся при высокой температуре и продлен при низкой температуре. В этом исследовании, проволока нагревается от электрического тока. Вращательное движение каждого привода было получено путем изменения плавных последовательностей. Передняя нога и задняя нога были подключены к средней ноге, соответственно. Средняя нога соединена с ротором на валу. Таким образом, фаза вращения была такая же, как и ротор. В отличие от этого, другие две ножки соединены панелями ссылок, которые генерируют сдвиг фазы 90°. Кроме того, шаг назад был получен путем вращения привода. ( Рис. 8)
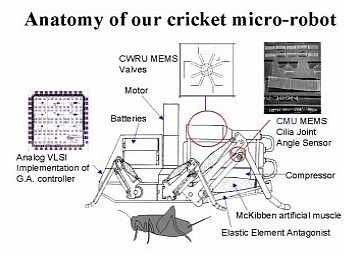
Рис. 8 Строение биомемитического наноробота
«Умная пыль»
Программа «Умная пыль», цель которой - создание объединения микро (в будущем - нано) устройств датчиков, достаточно автономных, способных общаться между собой и с центром управления. Множество таких «умных пылинок» может незаметно оседать на любой объект и передавать согласованную информацию в центр. Микродатчики «умной пыли» могут осуществлять непрерывный мониторинг окружающей среды, предсказывать приближающиеся катастрофы и террористические акты и, конечно, использоваться в военных целях. Сообщения от оператора меняют программу поведения микроробота. Система может быть «встроенной» (например, осуществлять мониторинг кровообращения и давления человека, мониторинг качества продуктов); может участвовать в слежении за миграцией птиц.
Для системы учеными Беркли создана уникальная сверхминиатюрная микросхема-радиопередатчик, которая в 50 раз меньше чипа сотового телефона и потребляет в 1000 раз меньше энергии. Проблема энергопитания в этом и во многих других случаях является ключевой. В некоторых устройствах предусматриваются как солнечные батареи, так и резервные аккумуляторы. Необходимость бережного потребления энергии заставила использовать ряд оригинальных технологий, при которых сигнал пылинки в несколько сот микроватт требует мощности в несколько милливатт. Для запуска в производство «умной пыли» основана специальная компания «Dust Inc». (Рис.9)
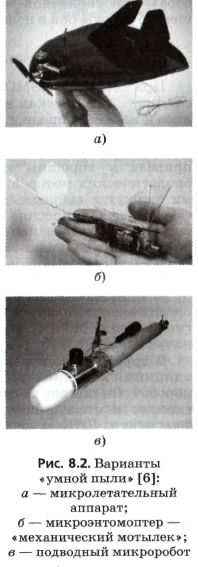
Рис.9 Варианты «умной пыли»
Наномоторы
При создании НЭМС, в частности наномоторов, исследователи в поисках вариантов, естественно, обратились к живой природе, где многие процессы идут на наноуровне и можно использовать уже имеющиеся компоненты биологических систем. К тому же эволюция привела к хорошим техническим характеристикам биологических моторов. Видимо, очень перспективными окажутся гибридные устройства, в которых будут сочетаться технические элементы с элементами живых систем. Использование методов генной инженерии и биотехнологии окажется при этом весьма полезным.
В частности, было предложено несколько вариантов наноактюаторов на основе ДНК. В одном из них к концу молекулы ДНК прикрепляется светоизлучающая органическая молекула, а к другому концу - светопоглощающая. Молекула ДНК, поочередно поглощая и излучая свет, то сворачивается, то разворачивается.
В другом варианте использовали фрагменты ДНК с «липкими концами» и создали двуногого шагающего наноробота. Он шагает за счет того, что поочередно присоединяет и отсоединяет ноги, представляющие собой фрагменты ДНК, к основанию, тоже состоящему из ДНК. В растворе плавают миллионы таких нанороботов. Внешне робот похож на щипцы для конфет: две двухцепочечные ДНК ноги длиной около 10 нм, упруго соединенные вверху (рис.10). Каждая нога состоит из 36 нуклеотидных пар с обычной последовательностью: аденин напротив тимина и гуанин напротив цитозина. Со свободных концов ног свисают совсем коротенькие одноцепочечные обрывки ДНК («липкие концы»). Робот ступает по особым опорам, тоже состоящим из ДНК, но не комплементарным кончикам ног. Поэтому без дополнительных обрывков ДНК - «якорей» он не держится на ногах. В начальный момент робот зафиксирован двумя одноцепочечными спиралями ДНК - «якорями», которые с одной стороны комплементарны окончаниям ног, а с другой - вершине опоры. Затем свободно плавающая в растворе спираль ДНК, изображенная на рисунке белым элементом, вступает с правым якорем в химическую связь и «уводит» его. Незакрепленная нога зависает над следующей подставкой, где ее подхватывает очередной «якорь» (позиция 4). Затем эта ситуация повторяется с левой ногой, и робот делает полный шаг.
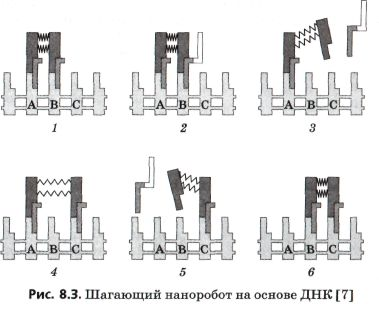
Рис.10 Шагающий наноробот на основе ДНК
5. ЗАКЛЮЧЕНИЕ
В заключение еще раз можно отметить, что микро- и нано-электромеханические системы обеспечат выход технологии на новый уровень, и, по-видимому, уже в ближайшее время прочно займут свое место в современной науке. С помощью развития этих технологий появится возможность создания роботов, которые смогут доставлять лекарства непосредственно в пораженные органы. Это поможет совершить прорыв мировой медицине, лечение тяжелых заболеваний будет возможным.
Когда это случится, нанотехнология окажет огромное влияние практически на все области промышленности и общества.
Человечество получит исключительно комфортную среду обитания, в которой не будет места ни голоду, ни болезням, ни изнурительному физическому труду. А в перспективе нас ждёт возникновение «разумной среды обитания» (т.е. природы, ставшей непосредственной производительной силой). Нанокомпьютеры и наномашины заполнят собой все окружающее пространство: они будут находиться между молекулами воздуха, присутствовать в каждом предмете, в каждой клетке человеческого организма. Весь окружающий мир превратится в один гигантский компьютер или, что, пожалуй, будет вернее, человечество сольется с окружающим миром в единый разумный организм.
Список литературы:
- В.А. Быков Нанотехнологии в МЭМС и НЭМС, микро- и наноэлектронике: современные технологические и аналитические возможности [Текст] // Приложение к журналу «Вестник РГРТУ». Рязань, 2009. — №4. — 4 с.
- А.В. Иванов , Е.И. Юревич Мини- и микроробототехника [Текст] // Учеб. пособ. — СПб.: Изд-во СПбГПУ. — 2011. — 96 с.
- О. Коленченко Как смартфоны чувствуют мир [Текст] // Научная статья. — 2014. — 9 c.
- Саленко Д.С. История развития и области применения технологии MEMS [Текст]// Научная статья. — Новосибирс ФГБОУ ВПО НГТУ. —2013. — 7 с.
- И. Е. Лысенко Учебный курс по компонентам микросистемной техники [Текст]// Таганрог,ТГТУ. —2009. — 120 с.
- Мальцев П.П. Нанотехнологии, Наноматериалы, Наносистемная техника, Мировые достижения, [Текст]//М. Техносфера. — 2008. —438 с.
- С.Сысоева МЭМС-технологии Простое и доступное решение сложных системных задач [Текст] // Научная статья. Электроника НТБ. — 2009.
- В. Алексеев Новые многофункциональные МЭМС-датчики движения [Текст] // Научная статья. — СПБ.Издательство Файнстрит —2015. — 4 с.
- Распопов В.Я. Микромеханические приборы [Текст] // Учебное пособие. - М.: Машиностроение, 2007. - 400 с.
- https://ru.wikipedia.org/wiki/Робототехника — Робототехника.
- https://ru.wikipedia.org/wiki/Микроэлектромеханические_системы — МЭМС.
- Борисенко, В.Е. Наноэлектроника [Текст] / В.Е. Борисенко, А.И. Воробьева, Е.А. Уткина. – М.: Бином. Лаборатория знаний, 2009. – 223 с.
- Нанотехнологии в электронике [Текст] / под ред. Ю.А. Чаплыгина. -М.: Техносфера. 2005. – 446 с.
Приложение 1. Контрольные вопросы
- В каком году были впервые продемонстрированы нанороботы на основе ДНК, способные перемещаться в пространстве:
- В 2003г.
- В 2014г.
- В 2010г.
- В 1997г.
- Из приведенных ниже размеров выберите те, которые удовлетворяют понятию наноразмерные системы:
- От 1 до 10 м
- От 10 до 100 нм
- 1000 нм
- От 100 до 1000 нм
- Все ответы являются верными
- Укажите размер сверхминиатюрной микросхемы-радиопередатчика для системы «Умная пыль»:
- 100 см
- От 1 до 10 нм
- В 50 раз меньше размера чипа сотового телефона
- Размером с чип сотового телефона
- 100 нм
- В каком году профессор Роберт Блайк из Висконсина, США, представил рабочий электромеханический маятник, который получил название «Наномеханический осциллятор Блайка»:
- В 1997г.
- В 2006г.
- В 1994г.
- В 2001г.
- В 2000г.
- Из скольки нуклеотидных пар состоит каждая нога двуногого шагающего наноробата:
- Из 43
- Из 50
- Из 32
- Из 37
- Из 36
|